
About
The Laboratório de Sistemas e Tecnologia Subaquática (LSTS) is an interdisciplinary research laboratory established in 1997 with researchers drawn from Electrical and Computer Engineering, Mechanical Engineering and from Computer Science.
The LSTS is specialized in the design, construction, and operation of unmanned underwater, surface and air vehicles and on the development of tools and technologies for the deployment of networked vehicle systems.
In the last 20 years researchers from the LSTS have successfully fielded unmanned air, ground, surface and underwater vehicles in the Atlantic and Pacific oceans, and also in the Mediterranean sea. These vehicle systems implement the LSTS control architecture with the help of the LSTS Neptus-IMC-Dune software toolchain. Neptus is a distributed command, control, communications and intelligence framework for operations with networked vehicles, systems, and human operators. IMC is a communications protocol that defines a common control message set understood by all types of LSTS nodes. DUNE is the system for vehicle on-board software. It is used to write generic embedded software at the heart of the vehicle, e.g. code for control, navigation, or to access sensors and actuators. It provides an operating-system and architecture independent C++ programming environment for writing efficient real-time reactive tasks in modular fashion. The toolchain has support for Disruptive Tolerant Network (DTN) protocols.
2021





2020
2019
Edition held under the NATO’s Maritime Unmanned Systems Initiative





2018
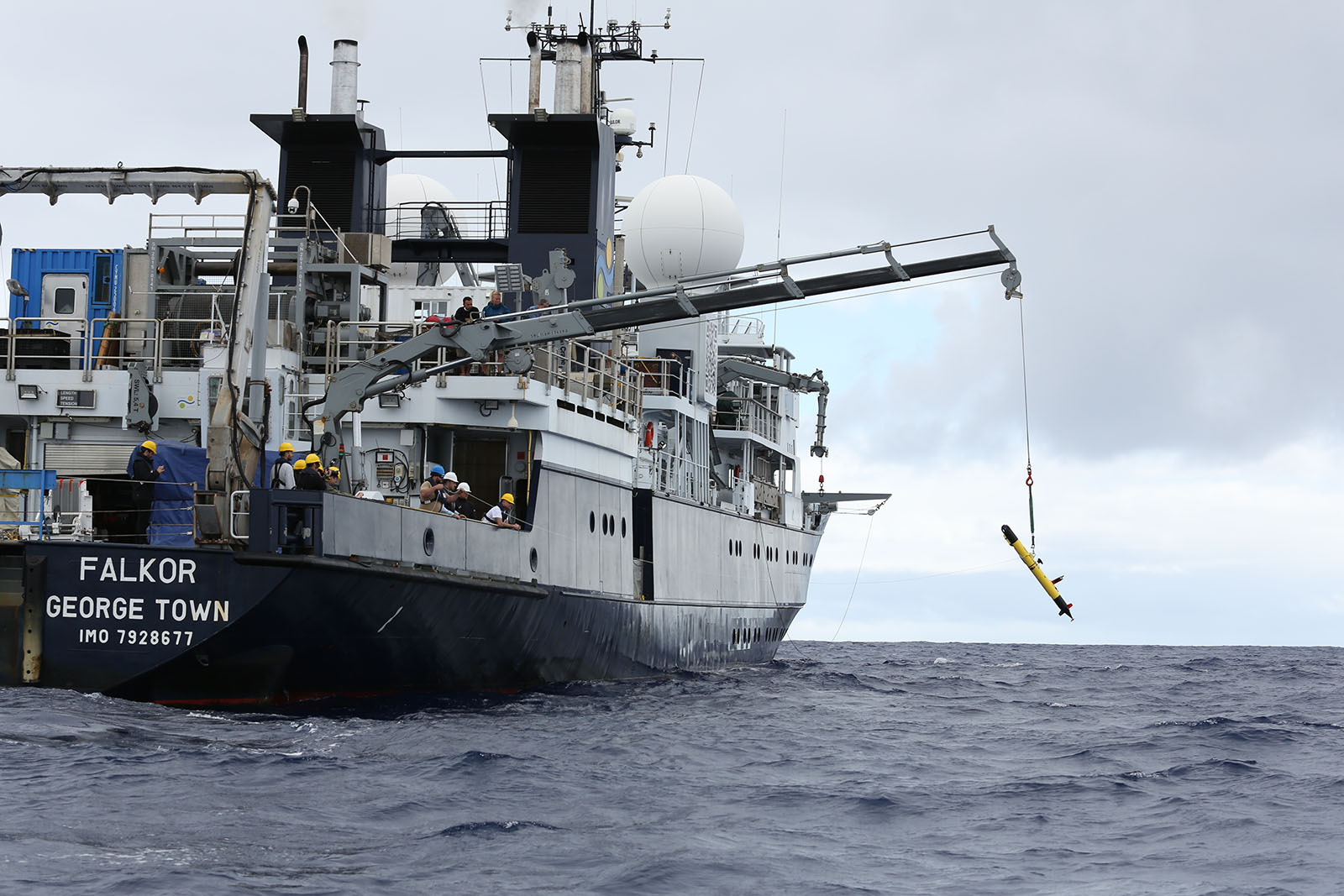
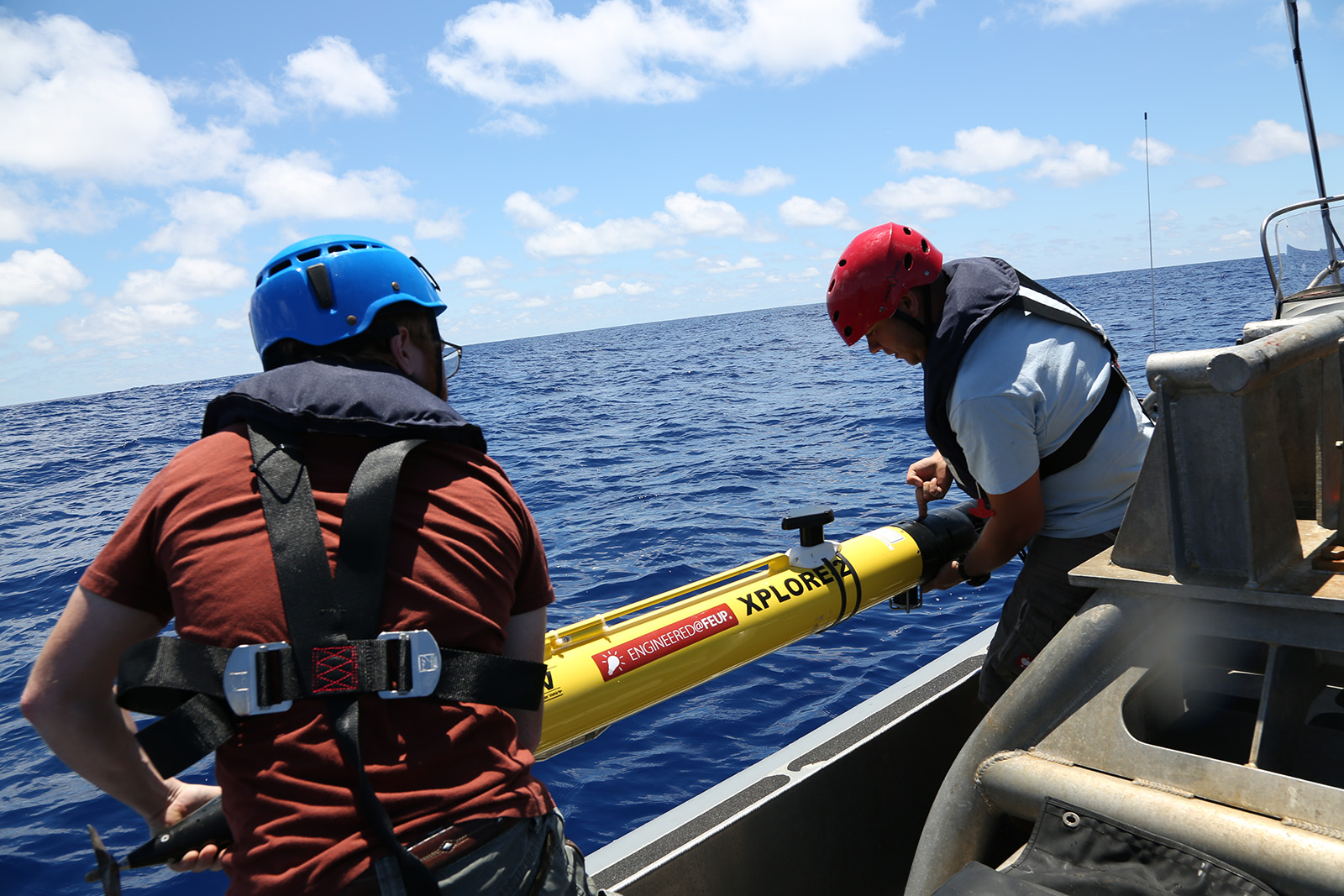
Subtropical Front - Pacific Ocean, on board R/V Falkor from the Schmidt Ocean Institute



Between Naval Undersea Warfare Center and FEUP, in the Maritime Cross Domain Communications area.
2016
Promotes collaboration between NASA-Ames and University of Porto. Oceans and earth observation areas.
Ocean and unmanned vehicles areas.
2015
Demonstration, evaluation and dissemination of new robotic systems, sensors and networking technologies in maritime incidents endangering human life, the environment and economic activities.




2013
CANON experiment , Pacific Ocean, organized by the Monterey Bay Aquarium Research Institute (MBARI), 2013. LSTS participated in this exercise with one LAUV AUV and technology for coordination with the Dorado AUV, the TEX Wave Glider and ships from MBARI for oceanographic data collection.
Adriatic Sea. Demonstration of Unmanned Air Vehicle systems for maritime applications.
Rapid Environmental Assessment (REP13) exercise organized in cooperation with the Portuguese Navy, Portugal, 2013




Conducting aerial operations and joint advanced studies
Collaboration in the field of unmanned vehicle networks for marine applications and the exchange of students
2012
Maiorca, Spanish Minex 2011
Alicante, Deep Divex 2011
Contex, Phibex 2011
2011
Design and evaluate controllers for Underwater vehicles, Aerial vehicles, Control of road traffic at the network level, Automated off-road guided vehicles and Control of distributed complex machines and to formulate control theory for the coordination of distributed systems.
2010
Spanish Minex 2010
HalifaxContex Phibex 2010





2008
Foundation of OceanScan - MST, LSTS spin-off.


2006
In 2006 the LSTS received the national BES Innovation National Award for the design of the Light AUV.
Swordfish exercise with the Portuguese Navy.
2005
Simposyum “Employment of unmanned vehicles in Naval Operations” promoted by the Portuguese Navy.
2004
Subsea Operations Kit
2002
Prototype of an Integrated System for Coastal Ocean Intensive Sampling
2001
Hierarchical Control of Semi-autonomous Teams under Uncertainty, DARPA
1999
1998
Development and demonstration of control and system evaluation techniques for the Mobile Offshore Base (CASSETTE), ONR
1996
LSTS aquires its first AUV