 |
DUNE: Uniform Navigational Environment
2.5.0-rc1
|
|
DUNE: Uniform Navigational Environment
2.5.0-rc1
|
Public Member Functions | |
| Task (const std::string &name, Tasks::Context &ctx) | |
| void | onUpdateParameters (void) |
| void | onResourceInitialization (void) |
| void | onResourceRelease (void) |
| void | onEntityResolution (void) |
| void | onReportEntityState (void) |
| void | consume (const IMC::EntityActivationState *msg) |
| bool | setup (void) |
| void | reset (void) |
| double | getBiasedHeading (void) |
| void | onConsumeLblConfig (void) |
| void | updateKalmanParametersGps (double hacc) |
| void | runKalmanGPS (double x, double y) |
| void | correctAlignment (double psi) |
| void | getSpeedOutputStates (unsigned *u, unsigned *v) |
| unsigned | getNumberOutputs (void) |
| void | task (void) |
| void | setTransition (Matrix &A) |
| void | resetKalman (void) |
| void | logData (void) |
 Public Member Functions inherited from DUNE::Navigation::BasicNavigation Public Member Functions inherited from DUNE::Navigation::BasicNavigation | |
| BasicNavigation (const std::string &name, Tasks::Context &ctx) | |
| virtual | ~BasicNavigation (void) |
| void | consume (const IMC::Acceleration *msg) |
| void | consume (const IMC::AngularVelocity *msg) |
| void | consume (const IMC::DataSanity *msg) |
| void | consume (const IMC::Distance *msg) |
| void | consume (const IMC::Depth *msg) |
| void | consume (const IMC::DepthOffset *msg) |
| void | consume (const IMC::EulerAngles *msg) |
| void | consume (const IMC::EulerAnglesDelta *msg) |
| void | consume (const IMC::GpsFix *msg) |
| void | consume (const IMC::GroundVelocity *msg) |
| void | consume (const IMC::LblConfig *msg) |
| void | consume (const IMC::LblRange *msg) |
| void | consume (const IMC::Rpm *msg) |
| void | consume (const IMC::WaterVelocity *msg) |
| Public Member Functions inherited from DUNE::Tasks::Periodic | |
| Periodic (const std::string &name, Context &ctx) | |
| virtual | ~Periodic (void) |
| void | setFrequency (double freq) |
| double | getFrequency (void) const |
| double | getRunTime (void) const |
| unsigned | getRunCount (void) const |
| Public Member Functions inherited from DUNE::Tasks::Task | |
| Task (const std::string &name, Context &context) | |
| virtual | ~Task (void) |
| const char * | getName (void) const |
| const char * | getSystemName (void) const |
| unsigned int | getSystemId (void) const |
| unsigned int | getEntityId (void) const |
| uint16_t | getActivationTime (void) const |
| uint16_t | getDeactivationTime (void) const |
| unsigned int | resolveSystemName (const std::string &name) const |
| const char * | resolveSystemId (unsigned int id) const |
| void | loadConfig (void) |
| void | setPriority (unsigned int value) |
| unsigned int | getPriority (void) const |
| void | inf (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void | war (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void void | err (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void void void | cri (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void void void void | debug (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void void void void void | trace (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void void void void void void | spew (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void void void void void void void | dispatch (IMC::Message *msg, unsigned int flags=0) |
| void | dispatch (IMC::Message &msg, unsigned int flags=0) |
| void | dispatchReply (const IMC::Message &original, IMC::Message &msg, unsigned int flags=0) |
| void | receive (const IMC::Message *msg) |
| void | reserveEntities (void) |
| void | resolveEntities (void) |
| void | acquireResources (void) |
| void | releaseResources (void) |
| void | initializeResources (void) |
| void | updateParameters (bool act_deact=true) |
| void | writeParamsXML (std::ostream &os) const |
| Public Member Functions inherited from DUNE::Tasks::AbstractTask | |
| AbstractTask (void) | |
| virtual | ~AbstractTask (void) |
| Public Member Functions inherited from DUNE::Concurrency::Thread | |
| Thread (void) | |
| virtual | ~Thread (void) |
| int | getProcessorUsage (void) |
| Public Member Functions inherited from DUNE::Concurrency::Runnable | |
| Runnable (void) | |
| virtual | ~Runnable (void) |
| void | start (void) |
| void | stop (void) |
| void | join (void) |
| void | stopAndJoin (void) |
| void | setPriority (Scheduler::Policy policy, unsigned priority) |
| State | getState (void) |
| bool | isCreated (void) |
| bool | isStopping (void) |
| bool | isRunning (void) |
| bool | isStarting (void) |
| bool | isDead (void) |
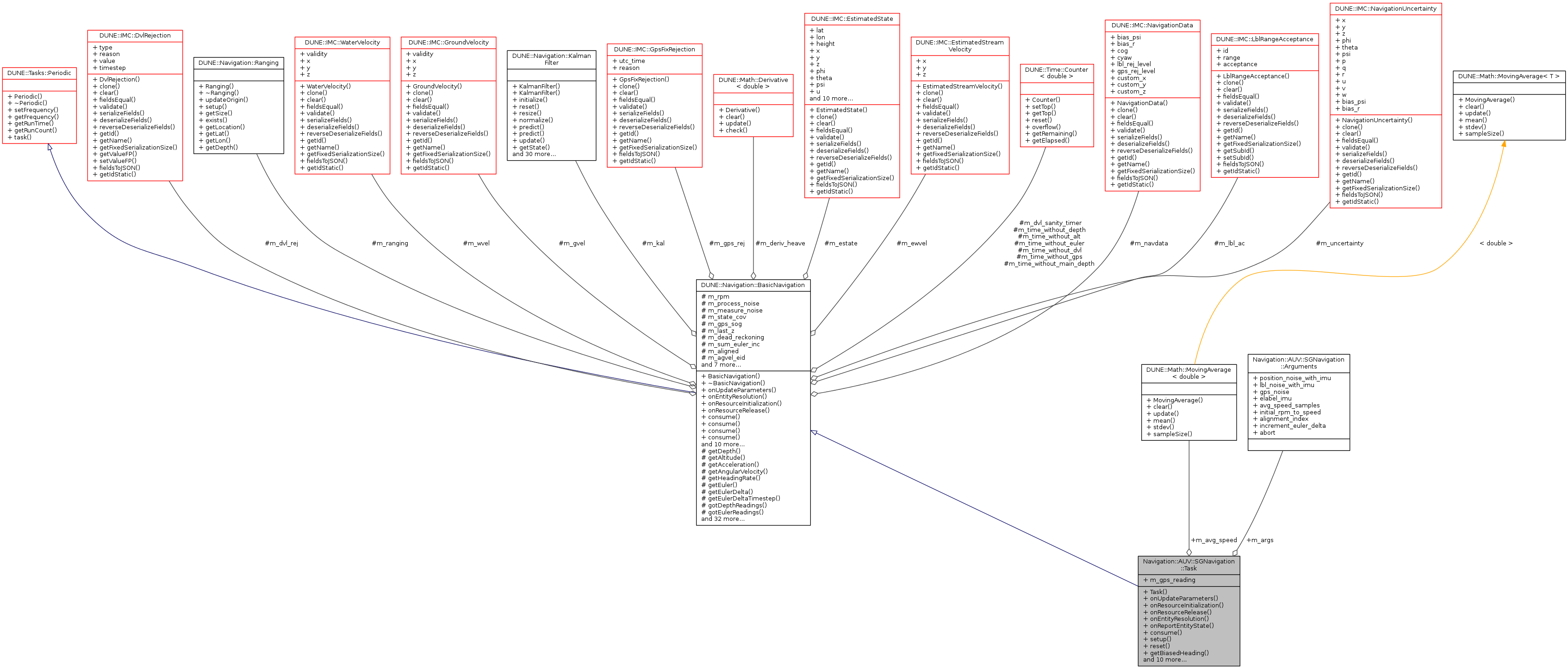
Public Attributes | |
| bool | m_gps_reading |
| MovingAverage< double > * | m_avg_speed |
| Arguments | m_args |
Additional Inherited Members | |
| Public Types inherited from DUNE::Concurrency::Runnable | |
| enum | State { StateStarting, StateRunning, StateStopping, StateDead, StateUnknown } |
| Protected Member Functions inherited from DUNE::Navigation::BasicNavigation | |
| double | getDepth (void) const |
| double | getAltitude (void) |
| double | getAcceleration (unsigned axis) const |
| double | getAngularVelocity (unsigned axis) const |
| double | getHeadingRate (void) |
| double | getEuler (unsigned axis) const |
| double | getEulerDelta (unsigned axis) const |
| float | getEulerDeltaTimestep (void) const |
| bool | gotDepthReadings (void) const |
| bool | gotEulerReadings (void) const |
| bool | gotAngularReadings (void) const |
| bool | gotAccelerationReadings (void) const |
| unsigned | getAhrsId (void) const |
| double | getLblRejectionValue (double exp_range) const |
| bool | rejectLbl (void) const |
| double | getTimeStep (void) |
| void | updateEuler (float filter) |
| void | updateEulerDelta (float filter) |
| void | updateAngularVelocities (float filter) |
| void | updateAcceleration (float filter) |
| void | updateDepth (float filter) |
| virtual void | updateKalmanGpsParameters (double hacc) |
| virtual void | runKalmanLBL (int beacon, float range, double dx, double dy, double exp_range) |
| virtual void | runKalmanDVL (void) |
| void | onDispatchNavigation (void) |
| bool | isActive (void) |
| void | reportToBus (void) |
| void | updateBuffers (float filter) |
| void | resetAcceleration (void) |
| void | resetAngularVelocity (void) |
| void | resetDepth (void) |
| void | resetEulerAngles (void) |
| void | resetEulerAnglesDelta (void) |
| void | checkUncertainty (bool abort=true) |
| void | checkDeclination (double lat, double lon, double height) |
| Protected Member Functions inherited from DUNE::Tasks::Task | |
| const char * | getEntityLabel (void) const |
| void | setEntityLabel (const std::string &label) |
| void | setEntityState (IMC::EntityState::StateEnum state, Status::Code code) |
| void | setEntityState (IMC::EntityState::StateEnum state, const std::string &description) |
| IMC::EntityState::StateEnum | getEntityState (void) const |
| unsigned int | reserveEntity (const std::string &label) |
| unsigned int | resolveEntity (const std::string &label) const |
| std::string | resolveEntity (unsigned int id) const |
| bool | stopping (void) |
| bool | isActive (void) const |
| void | waitForMessages (double timeout) |
| void | consumeMessages (void) |
| template<typename T > | |
| Parameter & | param (const std::string &name, T &var) |
| template<typename Y , typename T > | |
| Parameter & | param (const std::string &name, T &var) |
| template<typename T > | |
| bool | paramChanged (T &var) |
| void | paramActive (Parameter::Scope def_scope, Parameter::Visibility def_visibility, bool def_value=false) |
| void | setParamSectionEditor (const std::string &name) |
| template<typename M , typename T > | |
| void | bind (T *task_obj, void(T::*consumer)(const M *)=&T::consume) |
| template<typename T > | |
| void | bind (T *task_obj, const std::vector< uint32_t > &list) |
| template<typename T > | |
| void | bind (T *task_obj, const std::vector< std::string > &list) |
| void | requestActivation (void) |
| void | requestDeactivation (void) |
| void | activate (void) |
| void | activationFailed (const std::string &reason) |
| void | deactivate (void) |
| void | deactivationFailed (const std::string &reason) |
| virtual void | onEntityReservation (void) |
| virtual void | onResourceAcquisition (void) |
| virtual void | onRequestActivation (void) |
| virtual void | onRequestDeactivation (void) |
| virtual void | onActivation (void) |
| virtual void | onDeactivation (void) |
| Protected Member Functions inherited from DUNE::Concurrency::Thread | |
| void | startImpl (void) |
| void | stopImpl (void) |
| void | joinImpl (void) |
| void | setPriorityImpl (Scheduler::Policy policy, unsigned priority) |
| Protected Attributes inherited from DUNE::Navigation::BasicNavigation | |
| Navigation::KalmanFilter | m_kal |
| Navigation::Ranging | m_ranging |
| int16_t | m_rpm |
| std::vector< double > | m_process_noise |
| std::vector< double > | m_measure_noise |
| std::vector< double > | m_state_cov |
| IMC::EstimatedState | m_estate |
| IMC::EstimatedStreamVelocity | m_ewvel |
| IMC::LblRangeAcceptance | m_lbl_ac |
| IMC::GpsFixRejection | m_gps_rej |
| IMC::DvlRejection | m_dvl_rej |
| IMC::NavigationUncertainty | m_uncertainty |
| IMC::NavigationData | m_navdata |
| IMC::GroundVelocity | m_gvel |
| IMC::WaterVelocity | m_wvel |
| Time::Counter< double > | m_time_without_gps |
| Time::Counter< double > | m_time_without_dvl |
| Time::Counter< double > | m_time_without_alt |
| Time::Counter< double > | m_dvl_sanity_timer |
| Time::Counter< double > | m_time_without_main_depth |
| Time::Counter< double > | m_time_without_depth |
| Time::Counter< double > | m_time_without_euler |
| double | m_gps_sog |
| double | m_last_z |
| bool | m_dead_reckoning |
| bool | m_sum_euler_inc |
| bool | m_aligned |
| unsigned | m_agvel_eid |
| unsigned | m_accel_eid |
| unsigned | m_imu_eid |
| unsigned | m_alignment_eid |
| float | m_lbl_threshold |
| double | m_heading |
| bool | m_valid_gv |
| bool | m_valid_wv |
| Math::Derivative< double > | m_deriv_heave |
| Protected Attributes inherited from DUNE::Tasks::Task | |
| Context & | m_ctx |
|
inline |
References Navigation::AUV::SGNavigation::Arguments::abort, Navigation::AUV::SGNavigation::Arguments::alignment_index, Navigation::AUV::SGNavigation::Arguments::avg_speed_samples, DUNE::Tasks::Parameter::defaultValue(), DUNE::Tasks::Parameter::description(), Navigation::AUV::SGNavigation::Arguments::elabel_imu, Navigation::AUV::SGNavigation::Arguments::gps_noise, Navigation::AUV::SGNavigation::Arguments::increment_euler_delta, Navigation::AUV::SGNavigation::Arguments::initial_rpm_to_speed, Navigation::AUV::SGNavigation::Arguments::lbl_noise_with_imu, m_args, DUNE::Navigation::BasicNavigation::m_kal, DUNE::Navigation::BasicNavigation::m_measure_noise, DUNE::Navigation::BasicNavigation::m_process_noise, DUNE::Navigation::BasicNavigation::m_state_cov, Navigation::AUV::SGNavigation::NUM_OUT, Navigation::AUV::SGNavigation::NUM_STATE, DUNE::Tasks::Task::param(), Navigation::AUV::SGNavigation::Arguments::position_noise_with_imu, DUNE::Navigation::KalmanFilter::reset(), and resetKalman().
|
inline |
References DUNE::Navigation::BasicNavigation::getAhrsId(), DUNE::Navigation::Ranging::getSize(), Navigation::AUV::SGNavigation::Arguments::increment_euler_delta, Navigation::AUV::SGNavigation::Arguments::lbl_noise_with_imu, DUNE::Navigation::BasicNavigation::m_agvel_eid, DUNE::Navigation::BasicNavigation::m_aligned, m_args, DUNE::Navigation::BasicNavigation::m_dead_reckoning, DUNE::Navigation::BasicNavigation::m_imu_eid, DUNE::Navigation::BasicNavigation::m_kal, DUNE::Navigation::BasicNavigation::m_measure_noise, DUNE::Navigation::BasicNavigation::m_process_noise, DUNE::Navigation::BasicNavigation::m_ranging, DUNE::Navigation::BasicNavigation::m_state_cov, DUNE::Navigation::BasicNavigation::m_sum_euler_inc, Navigation::AUV::SGNavigation::MN_LBL, Navigation::AUV::SGNavigation::NUM_OUT, Navigation::AUV::SGNavigation::PN_POSITION, Navigation::AUV::SGNavigation::PN_PSI_BIAS, Navigation::AUV::SGNavigation::Arguments::position_noise_with_imu, DUNE::Navigation::KalmanFilter::resetCovariance(), Navigation::AUV::SGNavigation::SC_BIASES, DUNE::Navigation::KalmanFilter::setCovariance(), DUNE::Navigation::KalmanFilter::setMeasurementNoise(), DUNE::Navigation::KalmanFilter::setProcessNoise(), DUNE::Navigation::KalmanFilter::setState(), DUNE::Tasks::Task::spew(), Navigation::AUV::SGNavigation::STATE_PSI_BIAS, Navigation::AUV::SGNavigation::STATE_X, and Navigation::AUV::SGNavigation::STATE_Y.
|
inlinevirtual |
Routine called when an alignment result is received.
| [in] | psi | heading angle. |
Reimplemented from DUNE::Navigation::BasicNavigation.
References DUNE::Navigation::BasicNavigation::m_heading, DUNE::Navigation::BasicNavigation::m_kal, DUNE::Navigation::BasicNavigation::m_state_cov, DUNE::Navigation::KalmanFilter::resetCovariance(), Navigation::AUV::SGNavigation::SC_BIASES, DUNE::Navigation::KalmanFilter::setCovariance(), DUNE::Navigation::KalmanFilter::setState(), Navigation::AUV::SGNavigation::STATE_PSI, and Navigation::AUV::SGNavigation::STATE_PSI_BIAS.
|
inline |
|
inlinevirtual |
Get number of EKF outputs.
Implements DUNE::Navigation::BasicNavigation.
References Navigation::AUV::SGNavigation::NUM_OUT.
|
inlinevirtual |
Get EKF output matrix speed indexes.
| [out] | u | forward speed state index. |
| [out] | v | transversal speed state index. |
Implements DUNE::Navigation::BasicNavigation.
References Navigation::AUV::SGNavigation::OUT_U, and Navigation::AUV::SGNavigation::OUT_V.
|
inline |
References DUNE::IMC::NavigationUncertainty::bias_psi, DUNE::IMC::NavigationData::bias_psi, DUNE::IMC::NavigationData::bias_r, DUNE::IMC::NavigationData::cog, DUNE::IMC::NavigationData::custom_x, DUNE::IMC::NavigationData::custom_y, DUNE::IMC::NavigationData::custom_z, DUNE::Navigation::KalmanFilter::getCovariance(), DUNE::Navigation::BasicNavigation::getEuler(), DUNE::Navigation::KalmanFilter::getInnovation(), DUNE::Navigation::KalmanFilter::getState(), m_avg_speed, DUNE::Navigation::BasicNavigation::m_estate, DUNE::Navigation::BasicNavigation::m_ewvel, DUNE::Navigation::BasicNavigation::m_gvel, DUNE::Navigation::BasicNavigation::m_kal, DUNE::Navigation::BasicNavigation::m_navdata, DUNE::Navigation::BasicNavigation::m_time_without_dvl, DUNE::Navigation::BasicNavigation::m_uncertainty, DUNE::Navigation::BasicNavigation::m_valid_gv, DUNE::Navigation::BasicNavigation::m_valid_wv, DUNE::Navigation::BasicNavigation::m_wvel, DUNE::Navigation::BasicNavigation::onDispatchNavigation(), Navigation::AUV::SGNavigation::OUT_GPS_X, Navigation::AUV::SGNavigation::OUT_GPS_Y, DUNE::Time::Counter< T >::overflow(), DUNE::IMC::EstimatedState::phi, DUNE::IMC::EstimatedState::psi, DUNE::IMC::NavigationUncertainty::psi, DUNE::IMC::EstimatedState::r, DUNE::IMC::NavigationUncertainty::r, Navigation::AUV::SGNavigation::STATE_K, Navigation::AUV::SGNavigation::STATE_PSI, Navigation::AUV::SGNavigation::STATE_PSI_BIAS, Navigation::AUV::SGNavigation::STATE_R, Navigation::AUV::SGNavigation::STATE_R_BIAS, Navigation::AUV::SGNavigation::STATE_U, Navigation::AUV::SGNavigation::STATE_V, DUNE::IMC::EstimatedState::theta, DUNE::IMC::EstimatedState::u, DUNE::IMC::NavigationUncertainty::u, DUNE::Math::MovingAverage< T >::update(), DUNE::IMC::EstimatedState::v, DUNE::IMC::NavigationUncertainty::v, DUNE::IMC::EstimatedState::vx, DUNE::IMC::EstimatedState::vy, DUNE::IMC::GroundVelocity::x, DUNE::IMC::WaterVelocity::x, DUNE::IMC::EstimatedStreamVelocity::x, DUNE::IMC::GroundVelocity::y, DUNE::IMC::WaterVelocity::y, DUNE::IMC::EstimatedStreamVelocity::y, DUNE::IMC::GroundVelocity::z, DUNE::IMC::WaterVelocity::z, and DUNE::IMC::EstimatedStreamVelocity::z.
Referenced by task().
|
inlinevirtual |
Method invoked when LblConfig message is received.
Reimplemented from DUNE::Navigation::BasicNavigation.
References DUNE::Navigation::Ranging::getSize(), DUNE::Navigation::BasicNavigation::m_kal, DUNE::Navigation::BasicNavigation::m_ranging, Navigation::AUV::SGNavigation::NUM_OUT, onUpdateParameters(), and DUNE::Navigation::KalmanFilter::resize().
|
inlinevirtual |
Resolve entities.
Reimplemented from DUNE::Navigation::BasicNavigation.
References Navigation::AUV::SGNavigation::Arguments::elabel_imu, m_args, DUNE::Navigation::BasicNavigation::m_imu_eid, and DUNE::Tasks::Task::resolveEntity().
|
inlinevirtual |
Called when the task is instructed to report the state of its entities.
Derived classes that need to report the state of entities other than the main entity should override this function to dispatch the EntityState of those entities.
Reimplemented from DUNE::Tasks::Task.
References DUNE::Tasks::Task::dispatch(), DUNE::Navigation::BasicNavigation::m_aligned, and DUNE::Navigation::BasicNavigation::m_imu_eid.
|
inlinevirtual |
Initialize resources.
Reimplemented from DUNE::Navigation::BasicNavigation.
References Navigation::AUV::SGNavigation::Arguments::avg_speed_samples, m_args, and m_avg_speed.
|
inlinevirtual |
Release allocated resources.
Reimplemented from DUNE::Navigation::BasicNavigation.
References m_avg_speed.
|
inlinevirtual |
Update internal parameters.
Reimplemented from DUNE::Navigation::BasicNavigation.
References DUNE::Navigation::Ranging::getSize(), Navigation::AUV::SGNavigation::GPS_ACC_GOOD, Navigation::AUV::SGNavigation::Arguments::gps_noise, Navigation::AUV::SGNavigation::Arguments::lbl_noise_with_imu, m_args, DUNE::Navigation::BasicNavigation::m_dead_reckoning, DUNE::Navigation::BasicNavigation::m_kal, DUNE::Navigation::BasicNavigation::m_measure_noise, DUNE::Navigation::BasicNavigation::m_process_noise, DUNE::Navigation::BasicNavigation::m_ranging, Navigation::AUV::SGNavigation::MN_LBL, Navigation::AUV::SGNavigation::MN_PSI, Navigation::AUV::SGNavigation::MN_U, Navigation::AUV::SGNavigation::MN_V, Navigation::AUV::SGNavigation::MN_YAWRATE, Navigation::AUV::SGNavigation::NUM_OUT, Navigation::AUV::SGNavigation::OUT_GPS_X, Navigation::AUV::SGNavigation::OUT_GPS_Y, Navigation::AUV::SGNavigation::OUT_PSI, Navigation::AUV::SGNavigation::OUT_R, Navigation::AUV::SGNavigation::OUT_U, Navigation::AUV::SGNavigation::OUT_V, Navigation::AUV::SGNavigation::PN_POSITION, Navigation::AUV::SGNavigation::PN_PSI, Navigation::AUV::SGNavigation::PN_PSI_BIAS, Navigation::AUV::SGNavigation::PN_SPEED, Navigation::AUV::SGNavigation::PN_YAWRATE, Navigation::AUV::SGNavigation::PN_YRATE_BIAS, Navigation::AUV::SGNavigation::Arguments::position_noise_with_imu, DUNE::Navigation::KalmanFilter::setMeasurementNoise(), DUNE::Navigation::KalmanFilter::setProcessNoise(), Navigation::AUV::SGNavigation::STATE_PSI, Navigation::AUV::SGNavigation::STATE_PSI_BIAS, Navigation::AUV::SGNavigation::STATE_R, Navigation::AUV::SGNavigation::STATE_R_BIAS, Navigation::AUV::SGNavigation::STATE_U, Navigation::AUV::SGNavigation::STATE_V, Navigation::AUV::SGNavigation::STATE_X, and Navigation::AUV::SGNavigation::STATE_Y.
Referenced by onConsumeLblConfig().
|
inlinevirtual |
Routine to reset navigation.
Reimplemented from DUNE::Navigation::BasicNavigation.
References m_gps_reading.
|
inline |
References DUNE::Navigation::BasicNavigation::m_kal, Navigation::AUV::SGNavigation::OUT_GPS_X, Navigation::AUV::SGNavigation::OUT_GPS_Y, Navigation::AUV::SGNavigation::OUT_PSI, Navigation::AUV::SGNavigation::OUT_R, Navigation::AUV::SGNavigation::OUT_U, Navigation::AUV::SGNavigation::OUT_V, DUNE::Navigation::KalmanFilter::resetOutputs(), DUNE::Navigation::KalmanFilter::setObservation(), Navigation::AUV::SGNavigation::STATE_PSI, Navigation::AUV::SGNavigation::STATE_PSI_BIAS, Navigation::AUV::SGNavigation::STATE_R, Navigation::AUV::SGNavigation::STATE_R_BIAS, Navigation::AUV::SGNavigation::STATE_U, Navigation::AUV::SGNavigation::STATE_V, Navigation::AUV::SGNavigation::STATE_X, and Navigation::AUV::SGNavigation::STATE_Y.
|
inlinevirtual |
Routine to assign EKF filter output variables when a GpsFix message is received.
| [in] | x | vehicle north displacement (m). |
| [in] | y | vehicle east displacement (m). |
Reimplemented from DUNE::Navigation::BasicNavigation.
References m_gps_reading, DUNE::Navigation::BasicNavigation::m_kal, Navigation::AUV::SGNavigation::OUT_GPS_X, Navigation::AUV::SGNavigation::OUT_GPS_Y, and DUNE::Navigation::KalmanFilter::setOutput().
|
inline |
References DUNE::Math::Matrix::fill(), DUNE::Navigation::BasicNavigation::getEuler(), DUNE::Navigation::KalmanFilter::getState(), DUNE::Navigation::BasicNavigation::m_kal, DUNE::Navigation::BasicNavigation::m_rpm, DUNE::Navigation::BasicNavigation::m_time_without_dvl, DUNE::Navigation::BasicNavigation::m_time_without_gps, DUNE::Time::Counter< T >::overflow(), Navigation::AUV::SGNavigation::STATE_K, Navigation::AUV::SGNavigation::STATE_PSI, Navigation::AUV::SGNavigation::STATE_R, Navigation::AUV::SGNavigation::STATE_U, Navigation::AUV::SGNavigation::STATE_V, Navigation::AUV::SGNavigation::STATE_X, and Navigation::AUV::SGNavigation::STATE_Y.
Referenced by task().
|
inlinevirtual |
Routine to setup navigation.
Reimplemented from DUNE::Navigation::BasicNavigation.
References Navigation::AUV::SGNavigation::Arguments::initial_rpm_to_speed, m_args, DUNE::Navigation::BasicNavigation::m_kal, DUNE::Navigation::BasicNavigation::m_state_cov, Navigation::AUV::SGNavigation::SC_ANGLES, Navigation::AUV::SGNavigation::SC_BIASES, Navigation::AUV::SGNavigation::SC_POSITION, Navigation::AUV::SGNavigation::SC_RPM, Navigation::AUV::SGNavigation::SC_SPEED, DUNE::Navigation::KalmanFilter::setCovariance(), DUNE::Navigation::KalmanFilter::setState(), Navigation::AUV::SGNavigation::STATE_K, Navigation::AUV::SGNavigation::STATE_PSI, Navigation::AUV::SGNavigation::STATE_PSI_BIAS, Navigation::AUV::SGNavigation::STATE_R, Navigation::AUV::SGNavigation::STATE_R_BIAS, Navigation::AUV::SGNavigation::STATE_U, Navigation::AUV::SGNavigation::STATE_V, Navigation::AUV::SGNavigation::STATE_X, and Navigation::AUV::SGNavigation::STATE_Y.
|
inlinevirtual |
The task to be executed on each cycle.
Implements DUNE::Tasks::Periodic.
References Navigation::AUV::SGNavigation::Arguments::abort, Navigation::AUV::SGNavigation::Arguments::alignment_index, DUNE::Navigation::BasicNavigation::checkUncertainty(), getBiasedHeading(), DUNE::Navigation::KalmanFilter::getCovariance(), DUNE::Navigation::BasicNavigation::getEuler(), DUNE::Navigation::BasicNavigation::getHeadingRate(), DUNE::Navigation::KalmanFilter::getOutput(), DUNE::Navigation::KalmanFilter::getState(), DUNE::Navigation::BasicNavigation::getTimeStep(), logData(), DUNE::Navigation::BasicNavigation::m_aligned, m_args, DUNE::Navigation::BasicNavigation::m_dead_reckoning, m_gps_reading, DUNE::Navigation::BasicNavigation::m_gps_sog, DUNE::Navigation::BasicNavigation::m_heading, DUNE::Navigation::BasicNavigation::m_kal, DUNE::Navigation::BasicNavigation::m_rpm, DUNE::Navigation::BasicNavigation::m_time_without_dvl, DUNE::Navigation::BasicNavigation::m_time_without_gps, DUNE::Navigation::BasicNavigation::m_valid_gv, DUNE::Navigation::BasicNavigation::m_valid_wv, Navigation::AUV::SGNavigation::NUM_STATE, Navigation::AUV::SGNavigation::OUT_GPS_X, Navigation::AUV::SGNavigation::OUT_GPS_Y, Navigation::AUV::SGNavigation::OUT_PSI, Navigation::AUV::SGNavigation::OUT_R, Navigation::AUV::SGNavigation::OUT_U, Navigation::AUV::SGNavigation::OUT_V, DUNE::Time::Counter< T >::overflow(), DUNE::Navigation::KalmanFilter::predict(), DUNE::Navigation::BasicNavigation::reportToBus(), DUNE::Time::Counter< T >::reset(), resetKalman(), DUNE::Navigation::BasicNavigation::runKalmanDVL(), DUNE::Navigation::KalmanFilter::setCovarianceTransition(), DUNE::Navigation::KalmanFilter::setInnovation(), DUNE::Navigation::KalmanFilter::setObservation(), DUNE::Navigation::KalmanFilter::setOutput(), DUNE::Navigation::KalmanFilter::setStateTransition(), setTransition(), Navigation::AUV::SGNavigation::STATE_K, Navigation::AUV::SGNavigation::STATE_PSI, Navigation::AUV::SGNavigation::STATE_PSI_BIAS, Navigation::AUV::SGNavigation::STATE_R, Navigation::AUV::SGNavigation::STATE_R_BIAS, Navigation::AUV::SGNavigation::STATE_U, Navigation::AUV::SGNavigation::STATE_V, Navigation::AUV::SGNavigation::STATE_X, Navigation::AUV::SGNavigation::STATE_Y, DUNE::Navigation::KalmanFilter::update(), and DUNE::Navigation::BasicNavigation::updateBuffers().
|
inline |
References Navigation::AUV::SGNavigation::GPS_ACC_AVERAGE, Navigation::AUV::SGNavigation::GPS_ACC_BAD, Navigation::AUV::SGNavigation::GPS_ACC_GOOD, Navigation::AUV::SGNavigation::GPS_ACC_PERFECT, Navigation::AUV::SGNavigation::Arguments::gps_noise, m_args, DUNE::Navigation::BasicNavigation::m_kal, Navigation::AUV::SGNavigation::OUT_GPS_X, Navigation::AUV::SGNavigation::OUT_GPS_Y, and DUNE::Navigation::KalmanFilter::setMeasurementNoise().
| Arguments Navigation::AUV::SGNavigation::Task::m_args |
Task arguments.
Referenced by consume(), onEntityResolution(), onResourceInitialization(), onUpdateParameters(), setup(), Task(), task(), and updateKalmanParametersGps().
| MovingAverage<double>* Navigation::AUV::SGNavigation::Task::m_avg_speed |
Moving average for vehicle forward speed.
Referenced by logData(), onResourceInitialization(), and onResourceRelease().
| bool Navigation::AUV::SGNavigation::Task::m_gps_reading |
Periodic GPS fix reading check.
Referenced by reset(), runKalmanGPS(), and task().
 1.8.6
1.8.6