 |
DUNE: Uniform Navigational Environment
2.5.0-rc1
|
|
DUNE: Uniform Navigational Environment
2.5.0-rc1
|
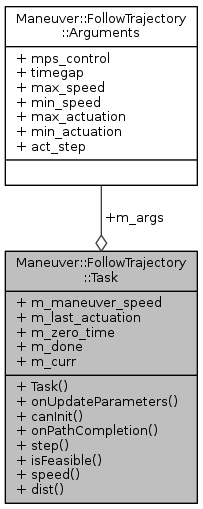
Public Member Functions | |
| Task (const std::string &name, DUNE::Tasks::Context &ctx) | |
| void | onUpdateParameters (void) |
| bool | canInit (const IMC::FollowTrajectory *maneuver) |
| void | onPathCompletion (void) |
| void | step (const IMC::EstimatedState &estate) |
| bool | isFeasible (void) |
| double | speed (int curr) |
| double | dist (int p1, int p2) |
Public Attributes | |
| IMC::DesiredSpeed | m_maneuver_speed |
| double | m_last_actuation |
| double | m_zero_time |
| bool | m_done |
| int | m_curr |
| Arguments | m_args |
|
inline |
References Maneuver::FollowTrajectory::Arguments::act_step, m_args, Maneuver::FollowTrajectory::Arguments::max_actuation, Maneuver::FollowTrajectory::Arguments::max_speed, Maneuver::FollowTrajectory::Arguments::min_actuation, Maneuver::FollowTrajectory::Arguments::min_speed, Maneuver::FollowTrajectory::Arguments::mps_control, and Maneuver::FollowTrajectory::Arguments::timegap.
|
inline |
|
inline |
|
inline |
Function for testing the trajectory's feasibility.
References m_args, Maneuver::FollowTrajectory::Arguments::max_speed, Maneuver::FollowTrajectory::Arguments::mps_control, and speed().
Referenced by canInit().
|
inline |
References m_done.
|
inline |
|
inline |
Function for computing the speed for travelling to the next point.
References dist().
Referenced by isFeasible(), and step().
|
inline |
References Maneuver::FollowTrajectory::Arguments::act_step, dist(), m_args, m_curr, m_done, m_last_actuation, m_zero_time, Maneuver::FollowTrajectory::Arguments::max_actuation, Maneuver::FollowTrajectory::Arguments::max_speed, Maneuver::FollowTrajectory::Arguments::min_actuation, Maneuver::FollowTrajectory::Arguments::min_speed, Maneuver::FollowTrajectory::Arguments::mps_control, speed(), Maneuver::FollowTrajectory::Arguments::timegap, and DUNE::Math::trimValue().
| Arguments Maneuver::FollowTrajectory::Task::m_args |
| int Maneuver::FollowTrajectory::Task::m_curr |
| bool Maneuver::FollowTrajectory::Task::m_done |
Path completion flag.
Referenced by canInit(), onPathCompletion(), and step().
| double Maneuver::FollowTrajectory::Task::m_last_actuation |
| IMC::DesiredSpeed Maneuver::FollowTrajectory::Task::m_maneuver_speed |
FollowTrajectory maneuver's speed.
Referenced by canInit().
| double Maneuver::FollowTrajectory::Task::m_zero_time |
 1.8.6
1.8.6