 |
DUNE: Uniform Navigational Environment
2.6.1
|
|
DUNE: Uniform Navigational Environment
2.6.1
|
Classes | |
| class | Error |
Public Member Functions | |
| UAVSimulation (Tasks::Task &task) | |
| UAVSimulation (const UAVSimulation &simul) | |
| UAVSimulation (Tasks::Task &task, const double &alt_time_cst) | |
| UAVSimulation (Tasks::Task &task, const double &bank_time_cst, const double &speed_time_cst) | |
| UAVSimulation (Tasks::Task &task, const double &bank_time_cst, const double &speed_time_cst, const double &alt_time_cst) | |
| UAVSimulation (Tasks::Task &task, const DUNE::Math::Matrix &vel) | |
| UAVSimulation (Tasks::Task &task, const DUNE::Math::Matrix &vel, const double &alt_time_cst) | |
| UAVSimulation (Tasks::Task &task, const DUNE::Math::Matrix &vel, const double &bank_time_cst, const double &speed_time_cst) | |
| UAVSimulation (Tasks::Task &task, const DUNE::Math::Matrix &vel, const double &bank_time_cst, const double &speed_time_cst, const double &alt_time_cst) | |
| UAVSimulation (Tasks::Task &task, const DUNE::Math::Matrix &vel, const double &bank_time_cst, const double &speed_time_cst, const double &airspeed_cmd, const double &bank_cmd) | |
| UAVSimulation (Tasks::Task &task, const DUNE::Math::Matrix &pos, const DUNE::Math::Matrix &vel) | |
| UAVSimulation (Tasks::Task &task, const DUNE::Math::Matrix &pos, const DUNE::Math::Matrix &vel, const double &alt_time_cst) | |
| UAVSimulation (Tasks::Task &task, const DUNE::Math::Matrix &pos, const DUNE::Math::Matrix &vel, const double &bank_time_cst, const double &speed_time_cst) | |
| UAVSimulation (Tasks::Task &task, const DUNE::Math::Matrix &pos, const DUNE::Math::Matrix &vel, const double &bank_time_cst, const double &speed_time_cst, const double &alt_time_cst) | |
| UAVSimulation (Tasks::Task &task, const DUNE::Math::Matrix &pos, const DUNE::Math::Matrix &vel, const double &bank_time_cst, const double &speed_time_cst, const double &airspeed_cmd, const double &bank_cmd) | |
| UAVSimulation (Tasks::Task &task, const DUNE::Math::Matrix &pos, const DUNE::Math::Matrix &vel, const double &bank_time_cst, const double &speed_time_cst, const double &alt_time_cst, const double &airspeed_cmd, const double &bank_cmd, const double &altitude_cmd) | |
| UAVSimulation & | operator= (const UAVSimulation &model) |
| void | resetModel (void) |
| UAVSimulation | update (const double ×tep) |
| UAVSimulation | update (const double ×tep, const double &bank_cmd) |
| UAVSimulation | update (const double ×tep, const double &bank_cmd, const double &airspeed_cmd) |
| UAVSimulation | update (const double ×tep, const double &bank_cmd, const double &airspeed_cmd, const double &altitude_cmd) |
| void | setCtrl (const double &bank_time_cst, const double &speed_time_cst) |
| void | setCtrl (const double &bank_time_cst, const double &speed_time_cst, const double &alt_time_cst) |
| void | setBankRateLim (const double &bank_rate_lim) |
| void | setAccelLim (const double &lon_accel_lim) |
| void | setVertSlopeLim (const double &vert_slope_lim) |
| DUNE::Math::Matrix | getPosition (void) |
| DUNE::Math::Matrix | getVelocity (void) |
| double | getAirspeed (void) |
| double | getBankCmd (void) |
| double | getAirspeedCmd (void) |
| double | getAltCmd (void) |
| void | setPosition (const DUNE::Math::Matrix &pos) |
| void | setVelocity (const DUNE::Math::Matrix &vel) |
| void | command (const double &bank_cmd) |
| void | command (const double &bank_cmd, const double &airspeed_cmd) |
| void | command (const double &bank_cmd, const double &airspeed_cmd, const double &altitude_cmd) |
| void | commandBank (const double &bank_cmd) |
| void | commandAirspeed (const double &airspeed_cmd) |
| void | commandAlt (const double &altitude_cmd) |
| void | commandFPA (const double &fpa_cmd) |
| void | commandPitch (const double &pitch_cmd) |
Public Attributes | |
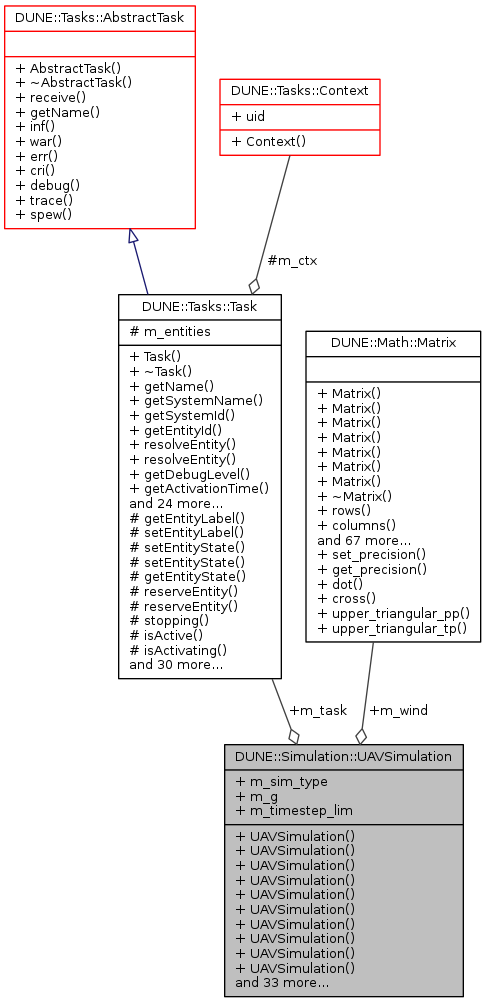
| Tasks::Task & | m_task |
| std::string | m_sim_type |
| DUNE::Math::Matrix | m_wind |
| double | m_g |
| double | m_timestep_lim |
| DUNE::Simulation::UAVSimulation::UAVSimulation | ( | Tasks::Task & | task | ) |
Constructor.
Create a simulation model with null initial state. 3 DOF simulation.
| [in] | task | - filter parent task. |
References resetModel().
| DUNE::Simulation::UAVSimulation::UAVSimulation | ( | const UAVSimulation & | simul | ) |
Constructor.
Create a simulation model as a copy of another
| [in] | simul | - simulation model to be replicated |
| DUNE::Simulation::UAVSimulation::UAVSimulation | ( | Tasks::Task & | task, |
| const double & | alt_time_cst | ||
| ) |
Constructor.
Create a simulation model with null initial state and the vehicle model parameters. 4 DOF simulation with altitude dynamics.
| [in] | task | - filter parent task. |
| [in] | alt_time_cst | - altitude time constant |
References resetModel().
| DUNE::Simulation::UAVSimulation::UAVSimulation | ( | Tasks::Task & | task, |
| const double & | bank_time_cst, | ||
| const double & | speed_time_cst | ||
| ) |
Constructor.
Create a simulation model with null initial state and the vehicle model parameters. 4 DOF simulation with bank and speed dynamics.
| [in] | task | - filter parent task. |
| [in] | bank_time_cst | - bank angle time constant |
| [in] | speed_time_cst | - airspeed time constant |
References resetModel().
| DUNE::Simulation::UAVSimulation::UAVSimulation | ( | Tasks::Task & | task, |
| const double & | bank_time_cst, | ||
| const double & | speed_time_cst, | ||
| const double & | alt_time_cst | ||
| ) |
Constructor.
Create a simulation model with null initial state and the vehicle model parameters. 5 DOF simulation with bank, speed, and altitude dynamics.
| [in] | task | - filter parent task. |
| [in] | bank_time_cst | - bank angle time constant |
| [in] | speed_time_cst | - airspeed time constant |
| [in] | alt_time_cst | - altitude time constant |
References resetModel().
| DUNE::Simulation::UAVSimulation::UAVSimulation | ( | Tasks::Task & | task, |
| const DUNE::Math::Matrix & | vel | ||
| ) |
Constructor.
Create a simulation model based on the initial velocity state. 3 DOF simulation.
| [in] | task | - filter parent task. |
| [in] | vel | - initial velocity vector |
References resetModel(), and setVelocity().
| DUNE::Simulation::UAVSimulation::UAVSimulation | ( | Tasks::Task & | task, |
| const DUNE::Math::Matrix & | vel, | ||
| const double & | alt_time_cst | ||
| ) |
Constructor.
Create a simulation model based on the initial velocity state and the vehicle model parameters. 4 DOF simulation with altitude dynamics.
| [in] | task | - filter parent task. |
| [in] | vel | - initial velocity vector |
| [in] | alt_time_cst | - altitude time constant |
References resetModel(), and setVelocity().
| DUNE::Simulation::UAVSimulation::UAVSimulation | ( | Tasks::Task & | task, |
| const DUNE::Math::Matrix & | vel, | ||
| const double & | bank_time_cst, | ||
| const double & | speed_time_cst | ||
| ) |
Constructor.
Create a simulation model based on the initial velocity state and the vehicle model parameters. 4 DOF simulation with bank and speed dynamics.
| [in] | task | - filter parent task. |
| [in] | vel | - initial velocity vector |
| [in] | bank_time_cst | - bank angle time constant |
| [in] | speed_time_cst | - airspeed time constant |
References resetModel(), and setVelocity().
| DUNE::Simulation::UAVSimulation::UAVSimulation | ( | Tasks::Task & | task, |
| const DUNE::Math::Matrix & | vel, | ||
| const double & | bank_time_cst, | ||
| const double & | speed_time_cst, | ||
| const double & | alt_time_cst | ||
| ) |
Constructor.
Create a simulation model based on the initial velocity state and the vehicle model parameters. 5 DOF simulation with bank, speed, and altitude dynamics.
| [in] | task | - filter parent task. |
| [in] | vel | - initial velocity vector |
| [in] | bank_time_cst | - bank angle time constant |
| [in] | speed_time_cst | - airspeed time constant |
| [in] | alt_time_cst | - altitude time constant |
References resetModel(), and setVelocity().
| DUNE::Simulation::UAVSimulation::UAVSimulation | ( | Tasks::Task & | task, |
| const DUNE::Math::Matrix & | vel, | ||
| const double & | bank_time_cst, | ||
| const double & | speed_time_cst, | ||
| const double & | airspeed_cmd, | ||
| const double & | bank_cmd | ||
| ) |
Constructor.
Create a simulation model based on the initial velocity state, the vehicle model parameters, and initial commands. 4 DOF simulation with bank and speed dynamics.
| [in] | task | - filter parent task. |
| [in] | vel | - initial velocity vector |
| [in] | bank_time_cst | - bank angle time constant |
| [in] | speed_time_cst | - airspeed time constant |
| [in] | airspeed_cmd | - applied airspeed command |
| [in] | bank_cmd | - applied bank command |
References commandAirspeed(), commandBank(), resetModel(), and setVelocity().
| DUNE::Simulation::UAVSimulation::UAVSimulation | ( | Tasks::Task & | task, |
| const DUNE::Math::Matrix & | pos, | ||
| const DUNE::Math::Matrix & | vel | ||
| ) |
Constructor.
Create a simulation model based on the initial state. 3 DOF simulation.
| [in] | task | - filter parent task. |
| [in] | pos | - initial position vector |
| [in] | vel | - initial velocity vector |
References resetModel(), setPosition(), and setVelocity().
| DUNE::Simulation::UAVSimulation::UAVSimulation | ( | Tasks::Task & | task, |
| const DUNE::Math::Matrix & | pos, | ||
| const DUNE::Math::Matrix & | vel, | ||
| const double & | alt_time_cst | ||
| ) |
Constructor.
Create a simulation model based on the initial state and the vehicle model parameters. 4 DOF simulation with altitude dynamics.
| [in] | task | - filter parent task. |
| [in] | pos | - initial position vector |
| [in] | vel | - initial velocity vector |
| [in] | alt_time_cst | - altitude time constant |
References resetModel(), setPosition(), and setVelocity().
| DUNE::Simulation::UAVSimulation::UAVSimulation | ( | Tasks::Task & | task, |
| const DUNE::Math::Matrix & | pos, | ||
| const DUNE::Math::Matrix & | vel, | ||
| const double & | bank_time_cst, | ||
| const double & | speed_time_cst | ||
| ) |
Constructor.
Create a simulation model based on the initial state and the vehicle model parameters. 4 DOF simulation with bank and speed dynamics.
| [in] | task | - filter parent task. |
| [in] | pos | - initial position vector |
| [in] | vel | - initial velocity vector |
| [in] | bank_time_cst | - bank angle time constant |
| [in] | speed_time_cst | - airspeed time constant |
References resetModel(), setPosition(), and setVelocity().
| DUNE::Simulation::UAVSimulation::UAVSimulation | ( | Tasks::Task & | task, |
| const DUNE::Math::Matrix & | pos, | ||
| const DUNE::Math::Matrix & | vel, | ||
| const double & | bank_time_cst, | ||
| const double & | speed_time_cst, | ||
| const double & | alt_time_cst | ||
| ) |
Constructor.
Create a simulation model based on the initial state and the vehicle model parameters. 5 DOF simulation with bank, speed, and altitude dynamics.
| [in] | task | - filter parent task. |
| [in] | pos | - initial position vector |
| [in] | vel | - initial velocity vector |
| [in] | bank_time_cst | - bank angle time constant |
| [in] | speed_time_cst | - airspeed time constant |
| [in] | alt_time_cst | - altitude time constant |
References resetModel(), setPosition(), and setVelocity().
| DUNE::Simulation::UAVSimulation::UAVSimulation | ( | Tasks::Task & | task, |
| const DUNE::Math::Matrix & | pos, | ||
| const DUNE::Math::Matrix & | vel, | ||
| const double & | bank_time_cst, | ||
| const double & | speed_time_cst, | ||
| const double & | airspeed_cmd, | ||
| const double & | bank_cmd | ||
| ) |
Constructor.
Create a simulation model based on the initial state, the vehicle model parameters, and initial commands. 4 DOF simulation with bank and speed dynamics.
| [in] | task | - filter parent task. |
| [in] | pos | - initial position vector |
| [in] | vel | - initial velocity vector |
| [in] | bank_time_cst | - bank angle time constant |
| [in] | speed_time_cst | - airspeed time constant |
| [in] | airspeed_cmd | - applied airspeed command |
| [in] | bank_cmd | - applied bank command |
References commandAirspeed(), commandBank(), resetModel(), setPosition(), and setVelocity().
| DUNE::Simulation::UAVSimulation::UAVSimulation | ( | Tasks::Task & | task, |
| const DUNE::Math::Matrix & | pos, | ||
| const DUNE::Math::Matrix & | vel, | ||
| const double & | bank_time_cst, | ||
| const double & | speed_time_cst, | ||
| const double & | alt_time_cst, | ||
| const double & | airspeed_cmd, | ||
| const double & | bank_cmd, | ||
| const double & | altitude_cmd | ||
| ) |
Constructor.
Create a simulation model based on the initial state, the vehicle model parameters, and initial commands. 5 DOF simulation with bank, speed, and altitude dynamics.
| [in] | task | - filter parent task. |
| [in] | pos | - initial position vector |
| [in] | vel | - initial velocity vector |
| [in] | bank_time_cst | - bank angle time constant |
| [in] | speed_time_cst | - airspeed time constant |
| [in] | alt_time_cst | - altitude time constant |
| [in] | airspeed_cmd | - applied airspeed command |
| [in] | bank_cmd | - applied bank command |
| [in] | altitude_cmd | - applied altitude command |
References commandAirspeed(), commandAlt(), commandBank(), resetModel(), setPosition(), and setVelocity().
| void DUNE::Simulation::UAVSimulation::command | ( | const double & | bank_cmd | ) |
This method sets the vehicle control commands.
| [in] | bank_cmd | - applied bank command |
References commandBank().
Referenced by Simulators::UAV::Task::onResourceAcquisition(), Maneuver::VehicleFormation::Coordinator::Task::onUpdateParameters(), and Maneuver::VehicleFormation::FormCollAvoid::Task::onUpdateParameters().
| void DUNE::Simulation::UAVSimulation::command | ( | const double & | bank_cmd, |
| const double & | airspeed_cmd | ||
| ) |
This method sets the vehicle control commands.
| [in] | bank_cmd | - applied bank command |
| [in] | airspeed_cmd | - applied airspeed command |
References commandAirspeed(), and commandBank().
| void DUNE::Simulation::UAVSimulation::command | ( | const double & | bank_cmd, |
| const double & | airspeed_cmd, | ||
| const double & | altitude_cmd | ||
| ) |
This method sets the vehicle control commands.
| [in] | bank_cmd | - applied bank command |
| [in] | airspeed_cmd | - applied airspeed command |
| [in] | altitude_cmd | - applied altitude command |
References commandAirspeed(), commandAlt(), and commandBank().
| void DUNE::Simulation::UAVSimulation::commandAirspeed | ( | const double & | airspeed_cmd | ) |
This method sets the vehicle airspeed command.
| [in] | airspeed_cmd | - applied airspeed command |
References DUNE::Math::isNaN(), m_task, and DUNE::Tasks::Task::war().
Referenced by command(), Simulators::UAV::Task::consume(), Maneuver::VehicleFormation::Coordinator::Task::consume(), Maneuver::VehicleFormation::FormCollAvoid::Task::consume(), UAVSimulation(), and update().
| void DUNE::Simulation::UAVSimulation::commandAlt | ( | const double & | altitude_cmd | ) |
This method sets the vehicle altitude command.
| [in] | altitude_cmd | - applied altitude command |
References DUNE::Math::isNaN(), m_sim_type, m_task, and DUNE::Tasks::Task::war().
Referenced by command(), Simulators::UAV::Task::consume(), Maneuver::VehicleFormation::Coordinator::Task::consume(), Maneuver::VehicleFormation::FormCollAvoid::Task::consume(), UAVSimulation(), and update().
| void DUNE::Simulation::UAVSimulation::commandBank | ( | const double & | bank_cmd | ) |
This method sets the vehicle bank command.
| [in] | bank_cmd | - applied bank command |
References DUNE::Math::isNaN(), m_task, and DUNE::Tasks::Task::war().
Referenced by command(), Simulators::UAV::Task::consume(), Maneuver::VehicleFormation::Coordinator::Task::consume(), Maneuver::VehicleFormation::FormCollAvoid::Task::consume(), UAVSimulation(), and update().
| void DUNE::Simulation::UAVSimulation::commandFPA | ( | const double & | fpa_cmd | ) |
This method sets the vehicle flight path angle command.
| [in] | fpa_cmd | - applied flight path angle command |
References DUNE::Math::isNaN(), m_task, and DUNE::Tasks::Task::war().
Referenced by Simulators::UAV::Task::consume().
| void DUNE::Simulation::UAVSimulation::commandPitch | ( | const double & | pitch_cmd | ) |
This method sets the vehicle pitch command.
| [in] | pitch_cmd | - applied pitch command |
References DUNE::Math::isNaN(), m_task, and DUNE::Tasks::Task::war().
| double DUNE::Simulation::UAVSimulation::getAirspeed | ( | void | ) |
This method gets the vehicle state.
Referenced by Maneuver::VehicleFormation::FormCollAvoid::Task::leaderOutput(), and Maneuver::VehicleFormation::Coordinator::Task::periodicUpdate().
| double DUNE::Simulation::UAVSimulation::getAirspeedCmd | ( | void | ) |
This method gets the vehicle airspeed command.
| double DUNE::Simulation::UAVSimulation::getAltCmd | ( | void | ) |
This method gets the vehicle altitude command.
| double DUNE::Simulation::UAVSimulation::getBankCmd | ( | void | ) |
This method gets the vehicle bank command.
Referenced by Maneuver::VehicleFormation::FormCollAvoid::Task::consume().
| DUNE::Math::Matrix DUNE::Simulation::UAVSimulation::getPosition | ( | void | ) |
This method gets the vehicle state.
Referenced by Maneuver::VehicleFormation::Coordinator::Task::periodicUpdate(), Simulators::UAV::Task::task(), Maneuver::VehicleFormation::FormCollAvoid::Task::teamPeriodicUpdate(), and Maneuver::VehicleFormation::FormCollAvoid::Task::teamUnevenUpdate().
| DUNE::Math::Matrix DUNE::Simulation::UAVSimulation::getVelocity | ( | void | ) |
This method gets the vehicle state.
Referenced by Maneuver::VehicleFormation::Coordinator::Task::periodicUpdate(), Simulators::UAV::Task::task(), Maneuver::VehicleFormation::FormCollAvoid::Task::teamPeriodicUpdate(), and Maneuver::VehicleFormation::FormCollAvoid::Task::teamUnevenUpdate().
| UAVSimulation & DUNE::Simulation::UAVSimulation::operator= | ( | const UAVSimulation & | model | ) |
This method assigns a UAVSimulation with another UAVSimulation.
| [in] | model | reference to UAV simulation model to be assigned |
References m_g, m_sim_type, m_timestep_lim, and m_wind.
| void DUNE::Simulation::UAVSimulation::resetModel | ( | void | ) |
This method resets all the vehicle model variables.
References m_g, m_timestep_lim, m_wind, and DUNE::Math::Matrix.
Referenced by UAVSimulation().
| void DUNE::Simulation::UAVSimulation::setAccelLim | ( | const double & | lon_accel_lim | ) |
This method sets the vehicle model longitudinal acceleration operation constraint.
| [in] | lon_accel_lim | - longitudinal acceleration limit |
Referenced by Simulators::UAV::Task::onResourceAcquisition(), Maneuver::VehicleFormation::Coordinator::Task::onUpdateParameters(), and Maneuver::VehicleFormation::FormCollAvoid::Task::onUpdateParameters().
| void DUNE::Simulation::UAVSimulation::setBankRateLim | ( | const double & | bank_rate_lim | ) |
This method sets the vehicle model bank rate operation constraint.
| [in] | bank_rate_lim | - bank rate limit |
Referenced by Simulators::UAV::Task::onResourceAcquisition(), Maneuver::VehicleFormation::Coordinator::Task::onUpdateParameters(), and Maneuver::VehicleFormation::FormCollAvoid::Task::onUpdateParameters().
| void DUNE::Simulation::UAVSimulation::setCtrl | ( | const double & | bank_time_cst, |
| const double & | speed_time_cst | ||
| ) |
This method sets the vehicle model control parameters.
| [in] | bank_time_cst | - bank angle time constant |
| [in] | speed_time_cst | - airspeed time constant |
Referenced by Maneuver::VehicleFormation::Coordinator::Task::onUpdateParameters(), and Maneuver::VehicleFormation::FormCollAvoid::Task::onUpdateParameters().
| void DUNE::Simulation::UAVSimulation::setCtrl | ( | const double & | bank_time_cst, |
| const double & | speed_time_cst, | ||
| const double & | alt_time_cst | ||
| ) |
This method sets the vehicle model control parameters.
| [in] | bank_time_cst | - bank angle time constant |
| [in] | speed_time_cst | - airspeed time constant |
| [in] | alt_time_cst | - altitude time constant |
| void DUNE::Simulation::UAVSimulation::setPosition | ( | const DUNE::Math::Matrix & | pos | ) |
This method sets the vehicle state.
| [in] | pos | - new position vector |
References m_sim_type, m_task, DUNE::Math::Matrix::rows(), DUNE::Math::Matrix::set(), and DUNE::Tasks::Task::war().
Referenced by Simulators::UAV::Task::consume(), Maneuver::VehicleFormation::Coordinator::Task::setLeaderState(), Maneuver::VehicleFormation::FormCollAvoid::Task::setLeaderState(), and UAVSimulation().
| void DUNE::Simulation::UAVSimulation::setVelocity | ( | const DUNE::Math::Matrix & | vel | ) |
This method sets the vehicle state.
| [in] | vel | - new velocity vector |
References m_sim_type, m_task, DUNE::Math::Matrix::rows(), DUNE::Math::Matrix::set(), and DUNE::Tasks::Task::war().
Referenced by Maneuver::VehicleFormation::Coordinator::Task::setLeaderState(), Maneuver::VehicleFormation::FormCollAvoid::Task::setLeaderState(), and UAVSimulation().
| void DUNE::Simulation::UAVSimulation::setVertSlopeLim | ( | const double & | vert_slope_lim | ) |
This method sets the vehicle model vertical slope operation constraint.
| [in] | vert_slope_lim | - vertical slope limit |
Referenced by Simulators::UAV::Task::onResourceAcquisition().
| UAVSimulation DUNE::Simulation::UAVSimulation::update | ( | const double & | timestep | ) |
This method updates the simulated state with the defined time step.
| [in] | timestep | - time step for the update |
References m_sim_type, m_task, m_timestep_lim, and DUNE::Tasks::Task::war().
Referenced by Maneuver::VehicleFormation::Coordinator::Task::periodicUpdate(), Simulators::UAV::Task::task(), Maneuver::VehicleFormation::FormCollAvoid::Task::teamPeriodicUpdate(), Maneuver::VehicleFormation::FormCollAvoid::Task::teamUnevenUpdate(), and update().
| UAVSimulation DUNE::Simulation::UAVSimulation::update | ( | const double & | timestep, |
| const double & | bank_cmd | ||
| ) |
This method updates the simulated state with the defined time step and controls.
| [in] | timestep | - time step for the update |
| [in] | bank_cmd | - applied bank command |
References commandBank(), and update().
| UAVSimulation DUNE::Simulation::UAVSimulation::update | ( | const double & | timestep, |
| const double & | bank_cmd, | ||
| const double & | airspeed_cmd | ||
| ) |
This method updates the simulated state with the defined time step and controls.
| [in] | timestep | - time step for the update |
| [in] | bank_cmd | - applied bank command |
| [in] | airspeed_cmd | - applied airspeed command |
References commandAirspeed(), commandBank(), and update().
| UAVSimulation DUNE::Simulation::UAVSimulation::update | ( | const double & | timestep, |
| const double & | bank_cmd, | ||
| const double & | airspeed_cmd, | ||
| const double & | altitude_cmd | ||
| ) |
This method updates the simulated state with the defined time step and controls.
| [in] | timestep | - time step for the update |
| [in] | bank_cmd | - applied bank command |
| [in] | airspeed_cmd | - applied airspeed command |
| [in] | altitude_cmd | - applied altitude command |
References commandAirspeed(), commandAlt(), commandBank(), and update().
| double DUNE::Simulation::UAVSimulation::m_g |
Gravity acceleration.
Referenced by operator=(), and resetModel().
| std::string DUNE::Simulation::UAVSimulation::m_sim_type |
| Tasks::Task& DUNE::Simulation::UAVSimulation::m_task |
Referenced by commandAirspeed(), commandAlt(), commandBank(), commandFPA(), commandPitch(), setPosition(), setVelocity(), and update().
| double DUNE::Simulation::UAVSimulation::m_timestep_lim |
Time step control.
Referenced by operator=(), resetModel(), and update().
| DUNE::Math::Matrix DUNE::Simulation::UAVSimulation::m_wind |
Wind state vector.
Referenced by Maneuver::VehicleFormation::FormCollAvoid::Task::leaderOutput(), Simulators::UAV::Task::onResourceAcquisition(), Simulators::UAV::Task::onUpdateParameters(), operator=(), Maneuver::VehicleFormation::Coordinator::Task::periodicUpdate(), resetModel(), Maneuver::VehicleFormation::Coordinator::Task::setLeaderState(), Maneuver::VehicleFormation::FormCollAvoid::Task::setLeaderState(), and Simulators::UAV::Task::task().
 1.8.6
1.8.6