 |
DUNE: Uniform Navigational Environment
2.6.1
|
|
DUNE: Uniform Navigational Environment
2.6.1
|
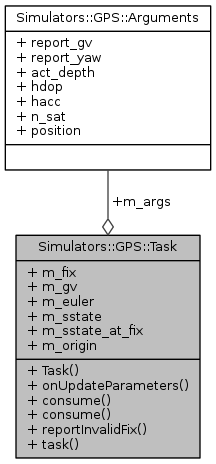
GPS simulator task.
Public Member Functions | |
| Task (const std::string &name, Tasks::Context &ctx) | |
| void | onUpdateParameters (void) |
| void | consume (const IMC::GpsFix *msg) |
| void | consume (const IMC::SimulatedState *msg) |
| void | reportInvalidFix (void) |
| void | task (void) |
Public Attributes | |
| IMC::GpsFix | m_fix |
| IMC::GroundVelocity | m_gv |
| IMC::EulerAngles | m_euler |
| IMC::SimulatedState | m_sstate |
| IMC::SimulatedState | m_sstate_at_fix |
| IMC::GpsFix | m_origin |
| Arguments | m_args |
|
inline |
References Simulators::GPS::Arguments::act_depth, Simulators::GPS::Arguments::hacc, Simulators::GPS::Arguments::hdop, m_args, m_euler, m_fix, m_gv, Simulators::GPS::Arguments::n_sat, Simulators::GPS::Arguments::position, Simulators::GPS::Arguments::report_gv, and Simulators::GPS::Arguments::report_yaw.
|
inline |
References m_origin.
|
inline |
References m_fix, m_sstate, and m_sstate_at_fix.
|
inline |
References m_args, m_origin, and Simulators::GPS::Arguments::position.
|
inline |
|
inline |
References Simulators::GPS::Arguments::act_depth, Simulators::GPS::Arguments::hacc, Simulators::GPS::Arguments::hdop, m_args, m_euler, m_fix, m_gv, m_origin, m_sstate, Simulators::GPS::Arguments::n_sat, Simulators::GPS::Arguments::report_gv, Simulators::GPS::Arguments::report_yaw, and reportInvalidFix().
| Arguments Simulators::GPS::Task::m_args |
Task arguments.
Referenced by onUpdateParameters(), Task(), and task().
| IMC::EulerAngles Simulators::GPS::Task::m_euler |
| IMC::GpsFix Simulators::GPS::Task::m_fix |
GPS Fix message.
Referenced by consume(), reportInvalidFix(), Task(), and task().
| IMC::GroundVelocity Simulators::GPS::Task::m_gv |
| IMC::GpsFix Simulators::GPS::Task::m_origin |
Origin for simulated state.
Referenced by consume(), onUpdateParameters(), and task().
| IMC::SimulatedState Simulators::GPS::Task::m_sstate |
| IMC::SimulatedState Simulators::GPS::Task::m_sstate_at_fix |
SimulatedState.
Referenced by consume().
 1.8.6
1.8.6