 |
DUNE: Uniform Navigational Environment
2016.03.0
|
|
DUNE: Uniform Navigational Environment
2016.03.0
|
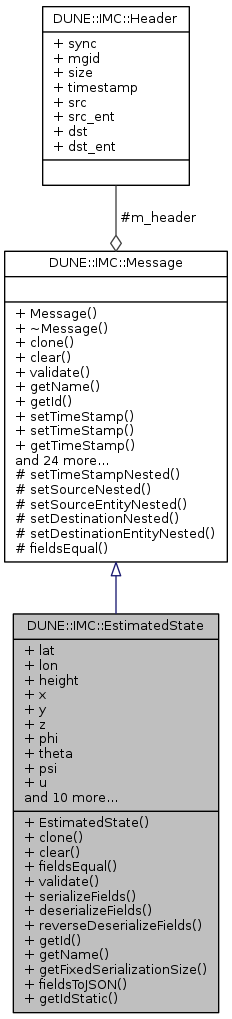
Estimated State.
Public Member Functions | |
| EstimatedState (void) | |
| Message * | clone (void) const |
| void | clear (void) |
| bool | fieldsEqual (const Message &msg__) const |
| int | validate (void) const |
| uint8_t * | serializeFields (uint8_t *bfr__) const |
| uint16_t | deserializeFields (const uint8_t *bfr__, uint16_t size__) |
| uint16_t | reverseDeserializeFields (const uint8_t *bfr__, uint16_t size__) |
| uint16_t | getId (void) const |
| const char * | getName (void) const |
| unsigned | getFixedSerializationSize (void) const |
| void | fieldsToJSON (std::ostream &os__, unsigned nindent__) const |
 Public Member Functions inherited from DUNE::IMC::Message Public Member Functions inherited from DUNE::IMC::Message | |
| Message (void) | |
| virtual | ~Message (void) |
| double | setTimeStamp (double ts) |
| double | setTimeStamp (void) |
| double | getTimeStamp (void) const |
| uint16_t | getSource (void) const |
| void | setSource (uint16_t src) |
| uint8_t | getSourceEntity (void) const |
| void | setSourceEntity (uint8_t src_ent) |
| uint16_t | getDestination (void) const |
| void | setDestination (uint16_t dst) |
| uint8_t | getDestinationEntity (void) const |
| void | setDestinationEntity (uint8_t dst_ent) |
| virtual uint16_t | getSubId (void) const |
| virtual void | setSubId (uint16_t subid) |
| virtual fp64_t | getValueFP (void) const |
| virtual void | setValueFP (fp64_t val) |
| unsigned | getSerializationSize (void) const |
| unsigned | getPayloadSerializationSize (void) const |
| virtual unsigned | getVariableSerializationSize (void) const |
| void | toJSON (std::ostream &os) const |
| void | toText (std::ostream &os) const |
| bool | operator== (const Message &other) const |
| bool | operator!= (const Message &other) const |
Static Public Member Functions | |
| static uint16_t | getIdStatic (void) |
Public Attributes | |
| fp64_t | lat |
| fp64_t | lon |
| fp32_t | height |
| fp32_t | x |
| fp32_t | y |
| fp32_t | z |
| fp32_t | phi |
| fp32_t | theta |
| fp32_t | psi |
| fp32_t | u |
| fp32_t | v |
| fp32_t | w |
| fp32_t | vx |
| fp32_t | vy |
| fp32_t | vz |
| fp32_t | p |
| fp32_t | q |
| fp32_t | r |
| fp32_t | depth |
| fp32_t | alt |
Additional Inherited Members | |
| Protected Member Functions inherited from DUNE::IMC::Message | |
| virtual void | setTimeStampNested (double value) |
| virtual void | setSourceNested (uint16_t value) |
| virtual void | setSourceEntityNested (uint8_t value) |
| virtual void | setDestinationNested (uint16_t value) |
| virtual void | setDestinationEntityNested (uint8_t value) |
| Protected Attributes inherited from DUNE::IMC::Message | |
| Header | m_header |
| DUNE::IMC::EstimatedState::EstimatedState | ( | void | ) |
References clear(), DUNE::IMC::Message::m_header, and DUNE::IMC::Header::mgid.
Referenced by clone().
|
virtual |
|
inlinevirtual |
Retrieve a copy of the message.
Implements DUNE::IMC::Message.
References EstimatedState().
|
virtual |
Deserialize message fields from a packet.
| bfr | stream of bytes (packet) |
| len | length of the byte stream. |
Implements DUNE::IMC::Message.
References alt, depth, DUNE::IMC::deserialize(), height, lat, lon, p, phi, psi, q, r, theta, u, v, vx, vy, vz, w, x, y, and z.
|
virtual |
|
virtual |
|
inlinevirtual |
Get the fixed amount of bytes required to properly serialize this message (variable length fields are not included).
Reimplemented from DUNE::IMC::Message.
|
inlinevirtual |
Retrieve message's identification number.
Implements DUNE::IMC::Message.
References getIdStatic().
|
inlinestatic |
Referenced by getId().
|
inlinevirtual |
|
virtual |
Deserialize message fields from a packet, swapping the byte order.
| bfr | stream of bytes (packet) |
| len | length of the byte stream. |
Implements DUNE::IMC::Message.
References alt, depth, height, lat, lon, p, phi, psi, q, r, DUNE::IMC::reverseDeserialize(), theta, u, v, vx, vy, vz, w, x, y, and z.
|
virtual |
|
virtual |
Validate the message's contents.
Implements DUNE::IMC::Message.
| fp32_t DUNE::IMC::EstimatedState::alt |
Altitude.
Referenced by clear(), DUNE::Control::BasicAutopilot::consume(), DUNE::Utils::Codecs::CodedEstimatedState::decode(), deserializeFields(), DUNE::Utils::Codecs::CodedEstimatedState::encode(), fieldsEqual(), fieldsToJSON(), DUNE::Maneuvers::Elevate::getVerticalError(), DUNE::Navigation::BasicNavigation::isActive(), DUNE::Navigation::BasicNavigation::onDispatchNavigation(), reverseDeserializeFields(), serializeFields(), and DUNE::Maneuvers::Elevate::update().
| fp32_t DUNE::IMC::EstimatedState::depth |
Referenced by clear(), DUNE::Control::BasicAutopilot::consume(), Control::ROV::RemoteOperation::Task::consume(), DUNE::Utils::Codecs::CodedEstimatedState::decode(), deserializeFields(), DUNE::Utils::Codecs::CodedEstimatedState::encode(), fieldsEqual(), fieldsToJSON(), DUNE::Maneuvers::Elevate::getVerticalError(), DUNE::Navigation::BasicNavigation::isActive(), DUNE::Control::SlopeData::isSurface(), DUNE::Navigation::BasicNavigation::onDispatchNavigation(), reverseDeserializeFields(), serializeFields(), and DUNE::Maneuvers::Elevate::update().
| fp32_t DUNE::IMC::EstimatedState::height |
Height (WGS-84).
Referenced by clear(), DUNE::Control::PathController::consume(), DUNE::Navigation::BasicNavigation::consume(), deserializeFields(), fieldsEqual(), fieldsToJSON(), DUNE::Navigation::BasicNavigation::isActive(), reverseDeserializeFields(), serializeFields(), DUNE::Navigation::BasicNavigation::setup(), and DUNE::Coordinates::toWGS84().
| fp64_t DUNE::IMC::EstimatedState::lat |
Latitude (WGS-84).
Referenced by clear(), DUNE::Control::PathController::consume(), DUNE::Maneuvers::VehicleFormation::consume(), DUNE::Navigation::BasicNavigation::consume(), DUNE::Utils::Codecs::CodedEstimatedState::decode(), deserializeFields(), fieldsEqual(), fieldsToJSON(), DUNE::Navigation::BasicNavigation::isActive(), reverseDeserializeFields(), serializeFields(), DUNE::Navigation::BasicNavigation::setup(), and DUNE::Coordinates::toWGS84().
| fp64_t DUNE::IMC::EstimatedState::lon |
Longitude (WGS-84).
Referenced by clear(), DUNE::Control::PathController::consume(), DUNE::Maneuvers::VehicleFormation::consume(), DUNE::Navigation::BasicNavigation::consume(), DUNE::Utils::Codecs::CodedEstimatedState::decode(), deserializeFields(), fieldsEqual(), fieldsToJSON(), DUNE::Navigation::BasicNavigation::isActive(), reverseDeserializeFields(), serializeFields(), DUNE::Navigation::BasicNavigation::setup(), and DUNE::Coordinates::toWGS84().
| fp32_t DUNE::IMC::EstimatedState::p |
Angular Velocity in x.
Referenced by clear(), deserializeFields(), fieldsEqual(), fieldsToJSON(), DUNE::Navigation::BasicNavigation::isActive(), DUNE::Navigation::BasicNavigation::onDispatchNavigation(), reverseDeserializeFields(), and serializeFields().
| fp32_t DUNE::IMC::EstimatedState::phi |
Rotation over x axis.
Referenced by clear(), deserializeFields(), fieldsEqual(), fieldsToJSON(), DUNE::Navigation::BasicNavigation::isActive(), DUNE::Navigation::BasicNavigation::onDispatchNavigation(), reverseDeserializeFields(), and serializeFields().
| fp32_t DUNE::IMC::EstimatedState::psi |
Rotation over z axis.
Referenced by clear(), DUNE::Control::PathController::consume(), Control::ROV::RemoteOperation::Task::consume(), DUNE::Utils::Codecs::CodedEstimatedState::decode(), deserializeFields(), DUNE::Utils::Codecs::CodedEstimatedState::encode(), fieldsEqual(), fieldsToJSON(), DUNE::Navigation::BasicNavigation::isActive(), Navigation::General::ROV::Task::logData(), Navigation::AUV::Navigation::Task::logData(), DUNE::Navigation::BasicNavigation::onDispatchNavigation(), reverseDeserializeFields(), and serializeFields().
| fp32_t DUNE::IMC::EstimatedState::q |
Angular Velocity in y.
Referenced by clear(), deserializeFields(), fieldsEqual(), fieldsToJSON(), DUNE::Navigation::BasicNavigation::isActive(), DUNE::Navigation::BasicNavigation::onDispatchNavigation(), reverseDeserializeFields(), and serializeFields().
| fp32_t DUNE::IMC::EstimatedState::r |
Angular Velocity in z.
Referenced by clear(), deserializeFields(), fieldsEqual(), fieldsToJSON(), DUNE::Navigation::BasicNavigation::isActive(), Navigation::General::ROV::Task::logData(), Navigation::AUV::Navigation::Task::logData(), reverseDeserializeFields(), and serializeFields().
| fp32_t DUNE::IMC::EstimatedState::theta |
| fp32_t DUNE::IMC::EstimatedState::u |
| fp32_t DUNE::IMC::EstimatedState::v |
| fp32_t DUNE::IMC::EstimatedState::vx |
Ground Velocity X (North).
Referenced by clear(), deserializeFields(), fieldsEqual(), fieldsToJSON(), Navigation::General::ROV::Task::logData(), Navigation::AUV::Navigation::Task::logData(), DUNE::Navigation::BasicNavigation::onDispatchNavigation(), reverseDeserializeFields(), and serializeFields().
| fp32_t DUNE::IMC::EstimatedState::vy |
Ground Velocity Y (East).
Referenced by clear(), deserializeFields(), fieldsEqual(), fieldsToJSON(), Navigation::General::ROV::Task::logData(), Navigation::AUV::Navigation::Task::logData(), DUNE::Navigation::BasicNavigation::onDispatchNavigation(), reverseDeserializeFields(), and serializeFields().
| fp32_t DUNE::IMC::EstimatedState::vz |
Ground Velocity Z (Down).
Referenced by clear(), deserializeFields(), fieldsEqual(), fieldsToJSON(), DUNE::Navigation::BasicNavigation::onDispatchNavigation(), reverseDeserializeFields(), and serializeFields().
| fp32_t DUNE::IMC::EstimatedState::w |
Body-Fixed zz Velocity.
Referenced by clear(), deserializeFields(), fieldsEqual(), fieldsToJSON(), DUNE::Navigation::BasicNavigation::onDispatchNavigation(), reverseDeserializeFields(), and serializeFields().
| fp32_t DUNE::IMC::EstimatedState::x |
| fp32_t DUNE::IMC::EstimatedState::y |
| fp32_t DUNE::IMC::EstimatedState::z |
 1.8.6
1.8.6