 |
DUNE: Uniform Navigational Environment
2016.05.0
|
|
DUNE: Uniform Navigational Environment
2016.05.0
|
Public Member Functions | |
| Task (const std::string &name, Tasks::Context &ctx) | |
| void | onUpdateParameters (void) |
| void | onResourceInitialization (void) |
| void | onResourceRelease (void) |
| void | consume (const IMC::EstimatedState *msg) |
| void | consume (const IMC::EulerAngles *msg) |
| void | consume (const IMC::GpsFix *msg) |
| void | consume (const IMC::LblConfig *msg) |
| void | consume (const IMC::LblRange *msg) |
| void | setup (void) |
| void | startFilter (const IMC::GpsFix *msg) |
| void | onMain (void) |
Public Attributes | |
| double | m_last_n |
| double | m_last_e |
| float | m_last_depth |
| double | m_yaw |
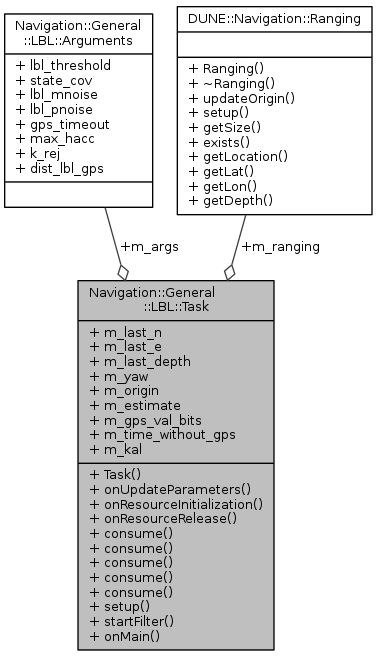
| DUNE::Navigation::Ranging | m_ranging |
| IMC::GpsFix * | m_origin |
| IMC::LblEstimate * | m_estimate [DUNE::Navigation::c_max_transponders] |
| uint16_t | m_gps_val_bits |
| Time::Counter< double > | m_time_without_gps |
| KalmanFilter | m_kal |
| Arguments | m_args |
|
inline |
References Navigation::General::LBL::Arguments::dist_lbl_gps, Navigation::General::LBL::Arguments::gps_timeout, Navigation::General::LBL::Arguments::k_rej, Navigation::General::LBL::Arguments::lbl_mnoise, Navigation::General::LBL::Arguments::lbl_pnoise, Navigation::General::LBL::Arguments::lbl_threshold, m_args, m_estimate, m_gps_val_bits, m_last_depth, m_last_e, m_last_n, m_yaw, Navigation::General::LBL::Arguments::max_hacc, and Navigation::General::LBL::Arguments::state_cov.
|
inline |
References m_kal, and m_last_depth.
|
inline |
References m_yaw.
|
inline |
References m_args, m_gps_val_bits, m_last_e, m_last_n, m_origin, m_time_without_gps, Navigation::General::LBL::Arguments::max_hacc, and startFilter().
|
inline |
References m_estimate, m_ranging, DUNE::Navigation::Ranging::setup(), and setup().
|
inline |
References Navigation::General::LBL::Arguments::dist_lbl_gps, DUNE::Navigation::Ranging::exists(), DUNE::Navigation::Ranging::getDepth(), DUNE::Navigation::Ranging::getSize(), Navigation::General::LBL::Arguments::k_rej, Navigation::General::LBL::Arguments::lbl_threshold, m_args, m_estimate, m_kal, m_last_depth, m_last_e, m_last_n, m_origin, m_ranging, m_time_without_gps, m_yaw, and DUNE::Math::transpose().
|
inline |
|
inline |
|
inline |
References m_estimate, and m_origin.
|
inline |
References Navigation::General::LBL::Arguments::gps_timeout, m_args, and m_time_without_gps.
|
inline |
Setup filter.
References DUNE::Navigation::Ranging::getLocation(), DUNE::Navigation::Ranging::getSize(), Navigation::General::LBL::Arguments::lbl_mnoise, Navigation::General::LBL::Arguments::lbl_pnoise, m_args, m_kal, m_ranging, and Navigation::General::LBL::Arguments::state_cov.
Referenced by consume().
|
inline |
| Arguments Navigation::General::LBL::Task::m_args |
Task arguments.
Referenced by consume(), onUpdateParameters(), setup(), and Task().
| IMC::LblEstimate* Navigation::General::LBL::Task::m_estimate[DUNE::Navigation::c_max_transponders] |
LBL position estimates.
Referenced by consume(), onResourceRelease(), and Task().
| uint16_t Navigation::General::LBL::Task::m_gps_val_bits |
| KalmanFilter Navigation::General::LBL::Task::m_kal |
| float Navigation::General::LBL::Task::m_last_depth |
| double Navigation::General::LBL::Task::m_last_e |
Last East reference displacement.
Referenced by consume(), startFilter(), and Task().
| double Navigation::General::LBL::Task::m_last_n |
Last North reference displacement.
Referenced by consume(), startFilter(), and Task().
| IMC::GpsFix* Navigation::General::LBL::Task::m_origin |
Navigation origin.
Referenced by consume(), onResourceRelease(), and startFilter().
| DUNE::Navigation::Ranging Navigation::General::LBL::Task::m_ranging |
LBL beacon information.
Referenced by consume(), setup(), and startFilter().
| Time::Counter<double> Navigation::General::LBL::Task::m_time_without_gps |
Time without GPS sensor readings deadline.
Referenced by consume(), and onUpdateParameters().
 1.8.6
1.8.6