 |
DUNE: Uniform Navigational Environment
2022.04.0
|
|
DUNE: Uniform Navigational Environment
2022.04.0
|
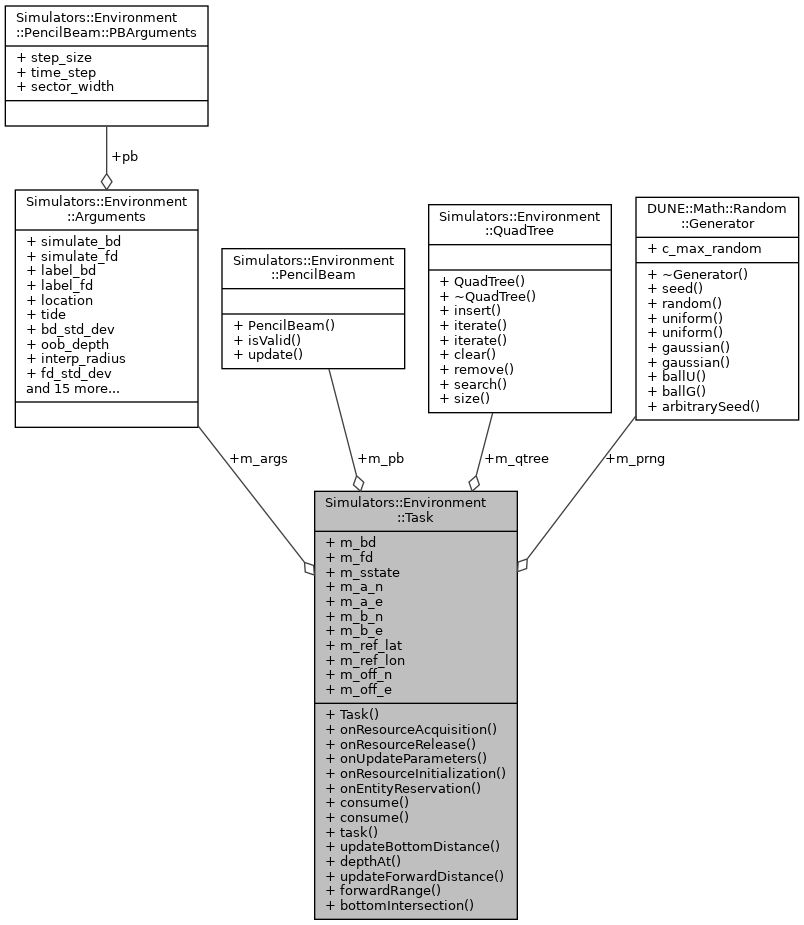
Public Member Functions | |
| Task (const std::string &name, Tasks::Context &ctx) | |
| void | onResourceAcquisition (void) |
| void | onResourceRelease (void) |
| void | onUpdateParameters (void) |
| void | onResourceInitialization (void) |
| void | onEntityReservation (void) |
| void | consume (const IMC::GpsFix *msg) |
| void | consume (const IMC::SimulatedState *msg) |
| void | task (void) |
| void | updateBottomDistance (void) |
| double | depthAt (double x, double y) |
| void | updateForwardDistance (void) |
| double | forwardRange (double psi_offset=0.0) |
| double | bottomIntersection (void) |
Public Attributes | |
| IMC::Distance | m_bd |
| IMC::Distance | m_fd |
| IMC::SimulatedState | m_sstate |
| double | m_a_n |
| double | m_a_e |
| double | m_b_n |
| double | m_b_e |
| Random::Generator * | m_prng |
| QuadTree * | m_qtree |
| double | m_ref_lat |
| double | m_ref_lon |
| double | m_off_n |
| double | m_off_e |
| PencilBeam * | m_pb |
| Arguments | m_args |
|
inline |
References Simulators::Environment::Arguments::bd_std_dev, Simulators::Environment::Arguments::bottom_orientation, Simulators::Environment::Arguments::bottom_position, Simulators::Environment::Arguments::bottom_width, Simulators::Environment::Arguments::fd_std_dev, Simulators::Environment::Arguments::forward_orientation, Simulators::Environment::Arguments::forward_position, Simulators::Environment::Arguments::forward_width, Simulators::Environment::Arguments::interp_radius, Simulators::Environment::Arguments::intersect_method, Simulators::Environment::Arguments::label_bd, Simulators::Environment::Arguments::label_fd, Simulators::Environment::Arguments::location, Simulators::Environment::Arguments::max_range, Simulators::Environment::Arguments::min_range, Simulators::Environment::Arguments::oob_depth, Simulators::Environment::Arguments::pb, Simulators::Environment::Arguments::pencil_beam, Simulators::Environment::Arguments::pier, Simulators::Environment::Arguments::prng_seed, Simulators::Environment::Arguments::prng_type, Simulators::Environment::PencilBeam::PBArguments::sector_width, Simulators::Environment::Arguments::simulate_bd, Simulators::Environment::Arguments::simulate_fd, Simulators::Environment::Arguments::simulate_pier, Simulators::Environment::PencilBeam::PBArguments::step_size, Simulators::Environment::Arguments::tide, and Simulators::Environment::PencilBeam::PBArguments::time_step.
|
inline |
Compute the depths of c_forward_points in front of the vehicle Use connections between these points as line segments and intersect them with lower beam part of the echo sounder.
References Simulators::Environment::Arguments::forward_width, DUNE::Math::lineSegmentIntersect(), and Simulators::Environment::Arguments::max_range.
|
inline |
References Simulators::Environment::Arguments::pier.
|
inline |
|
inline |
Compute depth at a certian (x, y) position.
| [in] | x | coordinate of position |
| [in] | y | coordinate of position |
References Simulators::Environment::Point::distance(), Simulators::Environment::Arguments::interp_radius, Simulators::Environment::Arguments::oob_depth, Simulators::Environment::QuadTree::search(), and Simulators::Environment::Arguments::tide.
|
inline |
Compute the forward range seen by the FLS according to obstacles and bottom.
References Simulators::Environment::Arguments::intersect_method, DUNE::Math::lineSegmentIntersect(), Simulators::Environment::Arguments::max_range, Simulators::Environment::Arguments::pencil_beam, and Simulators::Environment::Arguments::simulate_pier.
|
inline |
|
inline |
|
inline |
References Simulators::Environment::Arguments::bottom_orientation, Simulators::Environment::Arguments::bottom_position, Simulators::Environment::Arguments::bottom_width, Simulators::Environment::Bounds::cover(), Simulators::Environment::Arguments::forward_orientation, Simulators::Environment::Arguments::forward_position, Simulators::Environment::Arguments::forward_width, DUNE::Parsers::Config::get(), Simulators::Environment::Arguments::location, DUNE::Utils::String::split(), Simulators::Environment::QuadTree::Item::value, Simulators::Environment::QuadTree::Item::x, and Simulators::Environment::QuadTree::Item::y.
|
inline |
|
inline |
References Simulators::Environment::Arguments::bottom_orientation, Simulators::Environment::Arguments::bottom_width, Simulators::Environment::Arguments::forward_orientation, Simulators::Environment::Arguments::forward_width, Simulators::Environment::Arguments::pb, Simulators::Environment::PencilBeam::PencilBeam(), Simulators::Environment::Arguments::pier, Simulators::Environment::PencilBeam::PBArguments::sector_width, Simulators::Environment::PencilBeam::PBArguments::step_size, and Simulators::Environment::PencilBeam::PBArguments::time_step.
|
inline |
|
inline |
Update bottom distance value with bathymetry.
References Simulators::Environment::Arguments::bd_std_dev, and DUNE::Math::Random::Generator::gaussian().
|
inline |
Update forward distance value taking into account obstacles and the bottom.
References Simulators::Environment::Arguments::fd_std_dev, DUNE::Math::Random::Generator::gaussian(), Simulators::Environment::PencilBeam::isValid(), Simulators::Environment::Arguments::max_range, Simulators::Environment::Arguments::min_range, Simulators::Environment::Arguments::pencil_beam, DUNE::Math::trimValue(), and Simulators::Environment::PencilBeam::update().
| double Simulators::Environment::Task::m_a_e |
| double Simulators::Environment::Task::m_a_n |
Pier points offsets point A north, A east, B north ...
| double Simulators::Environment::Task::m_b_e |
| double Simulators::Environment::Task::m_b_n |
| IMC::Distance Simulators::Environment::Task::m_bd |
Bottom distance message.
| IMC::Distance Simulators::Environment::Task::m_fd |
Forward distance message.
| double Simulators::Environment::Task::m_off_e |
| double Simulators::Environment::Task::m_off_n |
NE offsets in regard to navigational reference.
| PencilBeam* Simulators::Environment::Task::m_pb |
Pencil beam object.
| Random::Generator* Simulators::Environment::Task::m_prng |
PRNG handle.
| QuadTree* Simulators::Environment::Task::m_qtree |
The tree.
| double Simulators::Environment::Task::m_ref_lat |
Reference latitude and longitude for data points.
| double Simulators::Environment::Task::m_ref_lon |
| IMC::SimulatedState Simulators::Environment::Task::m_sstate |
Current position.
 1.8.13
1.8.13