 |
DUNE: Uniform Navigational Environment
2024.09.0
|
|
DUNE: Uniform Navigational Environment
2024.09.0
|
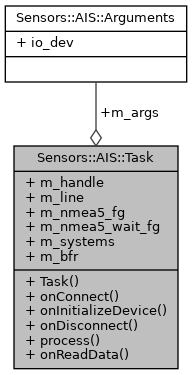
Public Member Functions | |
| Task (const std::string &name, Tasks::Context &ctx) | |
| bool | onConnect () override |
| void | onInitializeDevice () override |
| void | onDisconnect () override |
| void | process (std::string nmea_msg) |
| bool | onReadData () override |
Public Attributes | |
| IO::Handle * | m_handle |
| Arguments | m_args |
| std::string | m_line |
| std::string | m_nmea5_fg |
| bool | m_nmea5_wait_fg |
| std::map< int, std::string > | m_systems |
| std::vector< char > | m_bfr |
|
inline |
References Sensors::AIS::Arguments::io_dev.
|
inlineoverride |
Try to connect to the device.
References Sensors::AIS::Arguments::io_dev.
|
inlineoverride |
Disconnect from device.
|
inlineoverride |
No initialization process.
|
inlineoverride |
Get data from device.
|
inline |
Process AIS NMEA message.
References Sensors::AIS::ShipTypeCode::translate().
| std::vector<char> Sensors::AIS::Task::m_bfr |
Buffer.
| IO::Handle* Sensors::AIS::Task::m_handle |
Serial port handle.
| std::string Sensors::AIS::Task::m_line |
Current line.
| std::string Sensors::AIS::Task::m_nmea5_fg |
Saved first part of NMEA 5 class message.
| bool Sensors::AIS::Task::m_nmea5_wait_fg |
Waiting fragment.
| std::map<int, std::string> Sensors::AIS::Task::m_systems |
Vehicle Type.
 1.8.13
1.8.13