
CoMap - Cooperative Autonomous Multi-Vehicle Mapping System
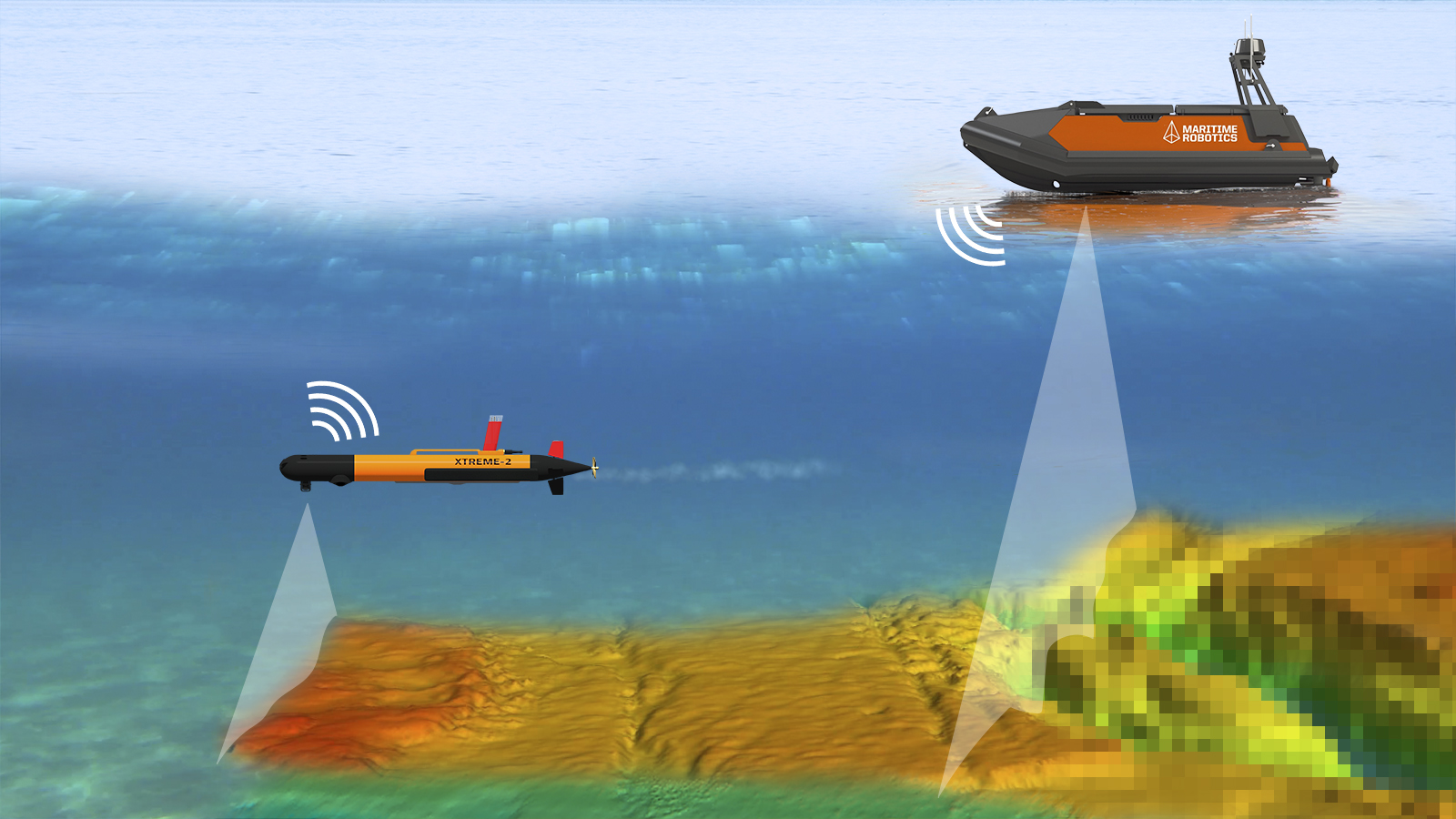
The CoMap project aims to create an end-to-end solution for bathymetric mapping with cooperative AUVs and ASVs, allowing the generation of seamless bathymetric charts between deep and shallow waters.
Oceanscan-MST promotes this project which also includes the participation of FEUP (LSTS) and Maritime Robotics AS. Financed by the Blue Growth program from EEA Grants, at 70%.
CoMap provides, for the first time, an end-to-end modular, multi-vehicle, bathymetric mapping solution allowing fast, high quality mapping at a low price point.
LSTS contributes, with a long standing experience of multi-vehicle systems, to the overall system design and multi-vehicle control station. The cooperative system will be based upon the LAUV, from Oceanscan-MST, and the Otter ASV, from Maritime Robotics, and is built upon DUNE, the onboard software, and NEPTUS, the command and control interface, both developed at LSTS.
The project is ongoing until the end of 2022 and the overall system design is already completed, and we will follow to implementation next!!
About EEA Grants
Through the European Economic Area (EEA) Agreement, Iceland, Liechtenstein and Norway are partners, in the internal market, of the Member States of the European Union.
As a way of promoting a continuous and balanced strengthening of the economic and trade relations, the parties of the European Economic Area Agreement have established a Multiannual Financial Mechanism, known as the EEA Grants.
EEA Grants aim to reduce social and economic disparities in Europeand strengthen bilateral relations between these three countries and the beneficiary countries.
For the period 2014-2021, a total contribution of €2.8 billion has been agreed for 15 beneficiary countries. Portugal will benefit from an amount of 102.7 million euros.
Learn more at: www.eeagrants.gov.pt