 |
DUNE: Uniform Navigational Environment
2.5.0-rc1
|
|
DUNE: Uniform Navigational Environment
2.5.0-rc1
|
Public Member Functions | |
| Task (const std::string &name, Tasks::Context &ctx) | |
| void | onEntityReservation (void) |
| void | onResourceRelease (void) |
| void | onResourceAcquisition (void) |
| void | onResourceInitialization (void) |
| uint8_t | convertAngleToDemand (unsigned servo, double angle) |
| void | consume (const IMC::SetServoPosition *msg) |
| void | setServoPosition (uint8_t servo, double position) |
| void | handleState (LUCL::Command::CommandPayload &cmd) |
| void | handleParamsEff (LUCL::Command::CommandPayload &cmd) |
| void | handleParamsCon (LUCL::Command::CommandPayload &cmd) |
| void | handleCommand (LUCL::Command *cmd) |
| void | onMain (void) |
Public Attributes | |
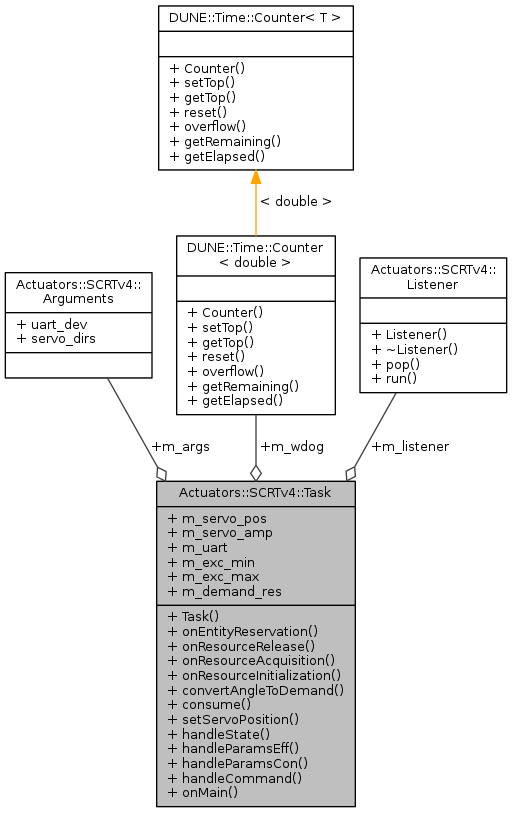
| Arguments | m_args |
| IMC::ServoPosition | m_servo_pos [c_servo_count] |
| IMC::Current | m_servo_amp [c_servo_count] |
| SerialPort * | m_uart |
| Listener * | m_listener |
| double | m_exc_min [c_servo_count] |
| double | m_exc_max [c_servo_count] |
| uint8_t | m_demand_res |
| Counter< double > | m_wdog |
|
inline |
|
inline |
References setServoPosition().
|
inline |
References m_args, m_demand_res, m_exc_max, m_exc_min, and Actuators::SCRTv4::Arguments::servo_dirs.
Referenced by setServoPosition().
|
inline |
References Actuators::SCRTv4::CMD_PARAMS_CON, Actuators::SCRTv4::CMD_PARAMS_EFF, Actuators::SCRTv4::CMD_STATE, handleParamsCon(), handleParamsEff(), and handleState().
Referenced by onMain().
|
inline |
References m_demand_res.
Referenced by handleCommand().
|
inline |
References m_exc_max, m_exc_min, and setServoPosition().
Referenced by handleCommand().
|
inline |
References m_args, m_exc_min, m_servo_amp, m_servo_pos, m_wdog, DUNE::Time::Counter< T >::reset(), and Actuators::SCRTv4::Arguments::servo_dirs.
Referenced by handleCommand().
|
inline |
References m_servo_amp, and m_servo_pos.
|
inline |
|
inline |
References m_args, m_listener, m_uart, and Actuators::SCRTv4::Arguments::uart_dev.
|
inline |
|
inline |
References m_listener, and m_uart.
|
inline |
References Actuators::SCRTv4::CMD_SERVO_SET, convertAngleToDemand(), and m_uart.
Referenced by consume(), and handleParamsEff().
| Arguments Actuators::SCRTv4::Task::m_args |
Task arguments.
Referenced by convertAngleToDemand(), handleState(), onResourceAcquisition(), and Task().
| uint8_t Actuators::SCRTv4::Task::m_demand_res |
Demand resolution.
Referenced by convertAngleToDemand(), and handleParamsCon().
| double Actuators::SCRTv4::Task::m_exc_max[c_servo_count] |
Maximum excursion (º).
Referenced by convertAngleToDemand(), and handleParamsEff().
| double Actuators::SCRTv4::Task::m_exc_min[c_servo_count] |
Minimum excursion (º).
Referenced by convertAngleToDemand(), handleParamsEff(), and handleState().
| Listener* Actuators::SCRTv4::Task::m_listener |
Referenced by onMain(), onResourceAcquisition(), and onResourceRelease().
| IMC::Current Actuators::SCRTv4::Task::m_servo_amp[c_servo_count] |
Current messages.
Referenced by handleState(), and onEntityReservation().
| IMC::ServoPosition Actuators::SCRTv4::Task::m_servo_pos[c_servo_count] |
Servo position messages.
Referenced by handleState(), and onEntityReservation().
| SerialPort* Actuators::SCRTv4::Task::m_uart |
Serial port device.
Referenced by onResourceAcquisition(), onResourceInitialization(), onResourceRelease(), and setServoPosition().
| Counter<double> Actuators::SCRTv4::Task::m_wdog |
Watchdog.
Referenced by handleState(), onMain(), and onResourceInitialization().
 1.8.6
1.8.6