 |
DUNE: Uniform Navigational Environment
2.5.0
|
|
DUNE: Uniform Navigational Environment
2.5.0
|
Public Member Functions | |
| Task (const std::string &name, Tasks::Context &ctx) | |
| void | onUpdateParameters (void) |
| void | onResourceRelease (void) |
| void | onEntityResolution (void) |
| void | consume (const IMC::CompassCalibration *maneuver) |
| void | consume (const IMC::EstimatedState *msg) |
| void | consume (const IMC::EulerAngles *msg) |
| void | consume (const IMC::MagneticField *msg) |
| void | consume (const IMC::PathControlState *pcs) |
| void | calibrate (void) |
| void | yoyoMotion (bool startup) |
 Public Member Functions inherited from DUNE::IMC::Message Public Member Functions inherited from DUNE::IMC::Message | |
| Message (void) | |
| virtual | ~Message (void) |
| virtual Message * | clone (void) const =0 |
| virtual void | clear (void)=0 |
| virtual int | validate (void) const =0 |
| virtual const char * | getName (void) const =0 |
| virtual uint16_t | getId (void) const =0 |
| double | setTimeStamp (double ts) |
| double | setTimeStamp (void) |
| double | getTimeStamp (void) const |
| uint16_t | getSource (void) const |
| void | setSource (uint16_t src) |
| uint8_t | getSourceEntity (void) const |
| void | setSourceEntity (uint8_t src_ent) |
| uint16_t | getDestination (void) const |
| void | setDestination (uint16_t dst) |
| uint8_t | getDestinationEntity (void) const |
| void | setDestinationEntity (uint8_t dst_ent) |
| virtual uint16_t | getSubId (void) const |
| virtual void | setSubId (uint16_t subid) |
| virtual fp64_t | getValueFP (void) const |
| virtual void | setValueFP (fp64_t val) |
| unsigned | getSerializationSize (void) const |
| unsigned | getPayloadSerializationSize (void) const |
| virtual unsigned | getFixedSerializationSize (void) const |
| virtual unsigned | getVariableSerializationSize (void) const |
| void | toJSON (std::ostream &os) const |
| void | toText (std::ostream &os) const |
| virtual uint8_t * | serializeFields (uint8_t *bfr) const =0 |
| virtual uint16_t | deserializeFields (const uint8_t *bfr, uint16_t len)=0 |
| virtual uint16_t | reverseDeserializeFields (const uint8_t *bfr, uint16_t len)=0 |
| virtual void | fieldsToJSON (std::ostream &os, unsigned indent_level) const |
| bool | operator== (const Message &other) const |
| bool | operator!= (const Message &other) const |
Public Attributes | |
| IMC::DesiredPath | m_path |
| IMC::DesiredPitch | m_pitch |
| IMC::EstimatedState | m_estate |
| IMC::MagneticField | m_mfield |
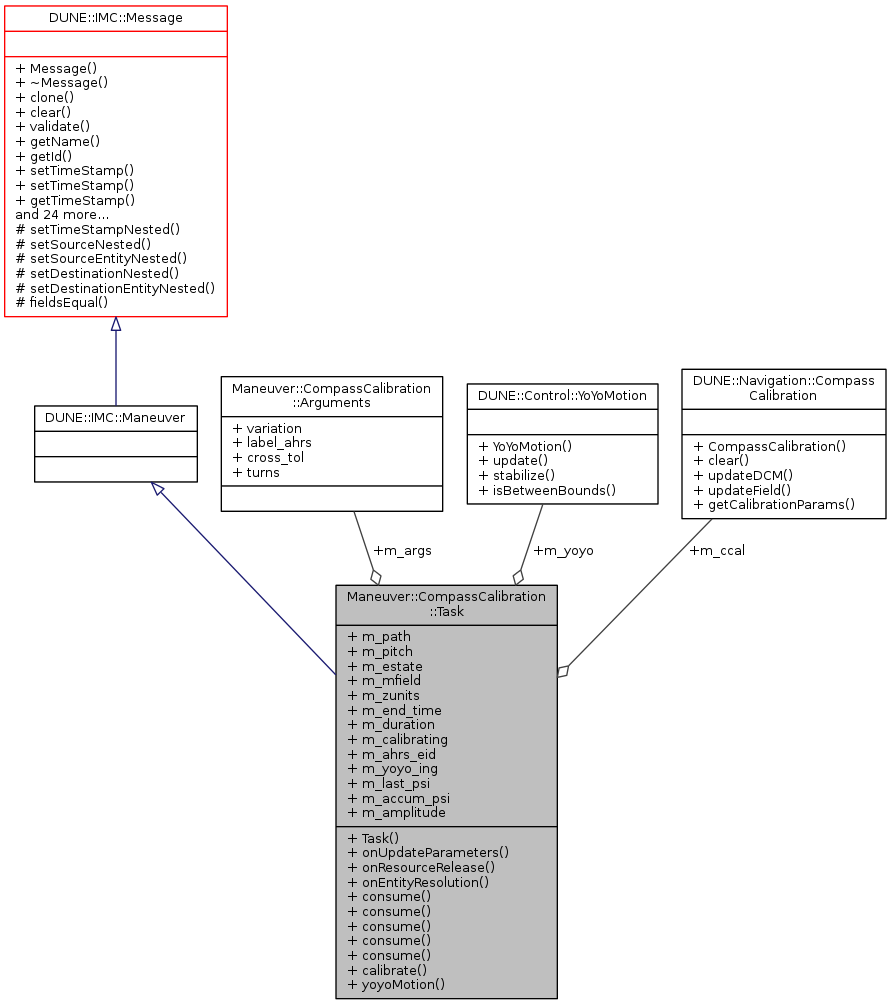
| DUNE::Navigation::CompassCalibration | m_ccal |
| DUNE::Control::YoYoMotion * | m_yoyo |
| IMC::ZUnits | m_zunits |
| double | m_end_time |
| uint16_t | m_duration |
| bool | m_calibrating |
| unsigned | m_ahrs_eid |
| bool | m_yoyo_ing |
| float | m_last_psi |
| float | m_accum_psi |
| float | m_amplitude |
| Arguments | m_args |
Additional Inherited Members | |
| Protected Member Functions inherited from DUNE::IMC::Message | |
| virtual void | setTimeStampNested (double value) |
| virtual void | setSourceNested (uint16_t value) |
| virtual void | setSourceEntityNested (uint8_t value) |
| virtual void | setDestinationNested (uint16_t value) |
| virtual void | setDestinationEntityNested (uint8_t value) |
| virtual bool | fieldsEqual (const Message &other) const |
| Protected Attributes inherited from DUNE::IMC::Message | |
| Header | m_header |
|
inline |
|
inline |
Run compass calibration.
References DUNE::Navigation::CompassCalibration::getCalibrationParams(), m_ccal, and m_mfield.
Referenced by consume().
|
inline |
References m_amplitude, m_args, m_calibrating, m_duration, m_end_time, m_path, m_pitch, m_yoyo, m_yoyo_ing, m_zunits, and Maneuver::CompassCalibration::Arguments::variation.
|
inline |
References m_estate, m_yoyo_ing, and yoyoMotion().
|
inline |
References m_ahrs_eid, m_ccal, and DUNE::Navigation::CompassCalibration::updateDCM().
|
inline |
References m_ahrs_eid, m_ccal, and DUNE::Navigation::CompassCalibration::updateField().
|
inline |
|
inline |
References Maneuver::CompassCalibration::Arguments::label_ahrs, m_ahrs_eid, m_args, and m_mfield.
|
inline |
References m_yoyo.
|
inline |
References m_args, and Maneuver::CompassCalibration::Arguments::variation.
|
inline |
| float Maneuver::CompassCalibration::Task::m_accum_psi |
Accumulated psi variation.
Referenced by consume().
| unsigned Maneuver::CompassCalibration::Task::m_ahrs_eid |
AHRS entity id.
Referenced by consume(), and onEntityResolution().
| float Maneuver::CompassCalibration::Task::m_amplitude |
Yoyo's amplitude.
Referenced by consume().
| Arguments Maneuver::CompassCalibration::Task::m_args |
Task arguments.
Referenced by consume(), onEntityResolution(), onUpdateParameters(), and Task().
| bool Maneuver::CompassCalibration::Task::m_calibrating |
In calibrating phase.
Referenced by consume().
| DUNE::Navigation::CompassCalibration Maneuver::CompassCalibration::Task::m_ccal |
Compass calibration algorithm.
Referenced by calibrate(), and consume().
| uint16_t Maneuver::CompassCalibration::Task::m_duration |
Duration of the maneuver.
Referenced by consume().
| double Maneuver::CompassCalibration::Task::m_end_time |
End time of the maneuver.
Referenced by consume().
| IMC::EstimatedState Maneuver::CompassCalibration::Task::m_estate |
EstimatedState.
Referenced by consume(), and yoyoMotion().
| float Maneuver::CompassCalibration::Task::m_last_psi |
Last value of psi.
Referenced by consume().
| IMC::MagneticField Maneuver::CompassCalibration::Task::m_mfield |
Magnetic Field for Compass Calibration.
Referenced by calibrate(), and onEntityResolution().
| IMC::DesiredPath Maneuver::CompassCalibration::Task::m_path |
Desired Path message.
Referenced by consume().
| IMC::DesiredPitch Maneuver::CompassCalibration::Task::m_pitch |
Desired Pitch for the maneuver.
Referenced by consume(), and yoyoMotion().
| DUNE::Control::YoYoMotion* Maneuver::CompassCalibration::Task::m_yoyo |
Yoyo motion controller.
Referenced by consume(), onResourceRelease(), and yoyoMotion().
| bool Maneuver::CompassCalibration::Task::m_yoyo_ing |
Started yoyo movements (not necessarily calibrating)
Referenced by consume().
| IMC::ZUnits Maneuver::CompassCalibration::Task::m_zunits |
Z units for the maneuver.
Referenced by consume(), and yoyoMotion().
 1.8.6
1.8.6