 |
DUNE: Uniform Navigational Environment
2.5.1
|
|
DUNE: Uniform Navigational Environment
2.5.1
|
Public Member Functions | |
| Task (const std::string &name, Tasks::Context &ctx) | |
| void | onUpdateParameters (void) |
| ~Task (void) | |
| void | onResourceAcquisition (void) |
| void | onResourceRelease (void) |
| void | onResourceInitialization (void) |
| void | onActivation (void) |
| void | onDeactivation (void) |
| bool | setTriggerFrequency (uint16_t frequency) |
| bool | setPower (bool on) |
| int32_t | read24b (const uint8_t *data) |
| bool | decodeFrame (const uint8_t *bfr, unsigned bfr_len) |
| void | onMain (void) |
 Public Member Functions inherited from DUNE::Tasks::Task Public Member Functions inherited from DUNE::Tasks::Task | |
| Task (const std::string &name, Context &context) | |
| const char * | getName (void) const |
| const char * | getSystemName (void) const |
| unsigned int | getSystemId (void) const |
| unsigned int | getEntityId (void) const |
| uint16_t | getActivationTime (void) const |
| uint16_t | getDeactivationTime (void) const |
| unsigned int | resolveSystemName (const std::string &name) const |
| const char * | resolveSystemId (unsigned int id) const |
| void | loadConfig (void) |
| void | setPriority (unsigned int value) |
| unsigned int | getPriority (void) const |
| void | inf (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void | war (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void void | err (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void void void | cri (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void void void void | debug (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void void void void void | trace (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void void void void void void | spew (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void void void void void void void | dispatch (IMC::Message *msg, unsigned int flags=0) |
| void | dispatch (IMC::Message &msg, unsigned int flags=0) |
| void | dispatchReply (const IMC::Message &original, IMC::Message &msg, unsigned int flags=0) |
| void | receive (const IMC::Message *msg) |
| void | reserveEntities (void) |
| void | resolveEntities (void) |
| void | acquireResources (void) |
| void | releaseResources (void) |
| void | initializeResources (void) |
| void | updateParameters (bool act_deact=true) |
| void | writeParamsXML (std::ostream &os) const |
| Public Member Functions inherited from DUNE::Tasks::AbstractTask | |
| AbstractTask (void) | |
| virtual | ~AbstractTask (void) |
| Public Member Functions inherited from DUNE::Concurrency::Thread | |
| Thread (void) | |
| virtual | ~Thread (void) |
| int | getProcessorUsage (void) |
| Public Member Functions inherited from DUNE::Concurrency::Runnable | |
| Runnable (void) | |
| virtual | ~Runnable (void) |
| void | start (void) |
| void | stop (void) |
| void | join (void) |
| void | stopAndJoin (void) |
| void | setPriority (Scheduler::Policy policy, unsigned priority) |
| State | getState (void) |
| bool | isCreated (void) |
| bool | isStopping (void) |
| bool | isRunning (void) |
| bool | isStarting (void) |
| bool | isDead (void) |
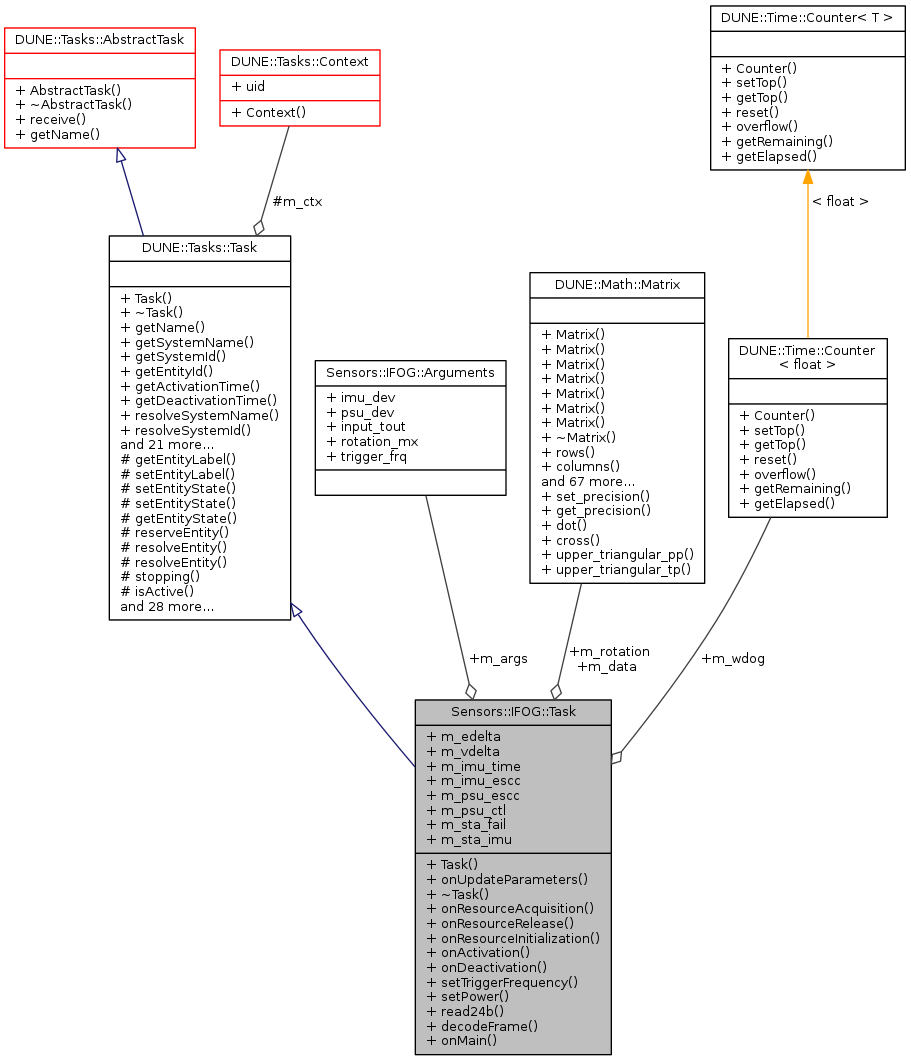
Public Attributes | |
| Matrix | m_rotation |
| Matrix | m_data |
| IMC::EulerAnglesDelta | m_edelta |
| IMC::VelocityDelta | m_vdelta |
| Counter< float > | m_wdog |
| double | m_imu_time |
| Hardware::ESCC * | m_imu_escc |
| Hardware::ESCC * | m_psu_escc |
| UCTK::Interface * | m_psu_ctl |
| uint16_t | m_sta_fail |
| uint16_t | m_sta_imu |
| Arguments | m_args |
Additional Inherited Members | |
| Public Types inherited from DUNE::Concurrency::Runnable | |
| enum | State { StateStarting, StateRunning, StateStopping, StateDead, StateUnknown } |
| Protected Member Functions inherited from DUNE::Tasks::Task | |
| const char * | getEntityLabel (void) const |
| void | setEntityLabel (const std::string &label) |
| void | setEntityState (IMC::EntityState::StateEnum state, Status::Code code) |
| void | setEntityState (IMC::EntityState::StateEnum state, const std::string &description) |
| IMC::EntityState::StateEnum | getEntityState (void) const |
| unsigned int | reserveEntity (const std::string &label) |
| unsigned int | resolveEntity (const std::string &label) const |
| std::string | resolveEntity (unsigned int id) const |
| bool | stopping (void) |
| bool | isActive (void) const |
| void | waitForMessages (double timeout) |
| void | consumeMessages (void) |
| template<typename T > | |
| Parameter & | param (const std::string &name, T &var) |
| template<typename Y , typename T > | |
| Parameter & | param (const std::string &name, T &var) |
| template<typename T > | |
| bool | paramChanged (T &var) |
| void | paramActive (Parameter::Scope def_scope, Parameter::Visibility def_visibility, bool def_value=false) |
| void | setParamSectionEditor (const std::string &name) |
| template<typename M , typename T > | |
| void | bind (T *task_obj, void(T::*consumer)(const M *)=&T::consume) |
| template<typename T > | |
| void | bind (T *task_obj, const std::vector< uint32_t > &list) |
| template<typename T > | |
| void | bind (T *task_obj, const std::vector< std::string > &list) |
| void | requestActivation (void) |
| void | requestDeactivation (void) |
| void | activate (void) |
| void | activationFailed (const std::string &reason) |
| void | deactivate (void) |
| void | deactivationFailed (const std::string &reason) |
| virtual void | onEntityReservation (void) |
| virtual void | onEntityResolution (void) |
| virtual void | onReportEntityState (void) |
| virtual void | onRequestActivation (void) |
| virtual void | onRequestDeactivation (void) |
| Protected Member Functions inherited from DUNE::Concurrency::Thread | |
| void | startImpl (void) |
| void | stopImpl (void) |
| void | joinImpl (void) |
| void | setPriorityImpl (Scheduler::Policy policy, unsigned priority) |
| Protected Attributes inherited from DUNE::Tasks::Task | |
| Context & | m_ctx |
|
inline |
References DUNE::Tasks::Parameter::defaultValue(), Sensors::IFOG::Arguments::imu_dev, Sensors::IFOG::Arguments::input_tout, m_args, m_data, DUNE::Tasks::Task::param(), DUNE::Tasks::Task::paramActive(), Sensors::IFOG::Arguments::psu_dev, DUNE::Math::Matrix::resize(), Sensors::IFOG::Arguments::rotation_mx, Sensors::IFOG::Arguments::trigger_frq, and DUNE::Tasks::Parameter::units().
|
inlinevirtual |
|
inline |
References DUNE::Tasks::Task::dispatch(), m_edelta, m_sta_fail, m_sta_imu, m_vdelta, Sensors::IFOG::OFF_ANG_INC0, Sensors::IFOG::OFF_ANG_INC1, Sensors::IFOG::OFF_ANG_INC2, Sensors::IFOG::OFF_STA_FAIL, Sensors::IFOG::OFF_STA_IMU, Sensors::IFOG::OFF_VEL_INC0, Sensors::IFOG::OFF_VEL_INC1, Sensors::IFOG::OFF_VEL_INC2, and read24b().
Referenced by onMain().
|
inlinevirtual |
Called when the task starts/resumes normal execution.
Reimplemented from DUNE::Tasks::Task.
References setPower().
|
inlinevirtual |
Called when the task stops normal execution and enters an idleness state.
Reimplemented from DUNE::Tasks::Task.
References DUNE::Tasks::Task::setEntityState(), and setPower().
|
inlinevirtual |
Implements DUNE::Tasks::Task.
References DUNE::Tasks::Task::consumeMessages(), decodeFrame(), DUNE::Tasks::Task::isActive(), m_imu_escc, m_sta_fail, m_sta_imu, m_wdog, DUNE::Time::Counter< T >::overflow(), DUNE::Time::Counter< T >::reset(), DUNE::Tasks::Task::setEntityState(), DUNE::Tasks::Task::stopping(), and DUNE::Tasks::Task::waitForMessages().
|
inlinevirtual |
Called when the task is instructed to acquire resources whose configuration is defined by run-time parameters.
Reimplemented from DUNE::Tasks::Task.
References Sensors::IFOG::Arguments::imu_dev, DUNE::Tasks::Task::inf(), m_args, m_imu_escc, m_psu_ctl, m_psu_escc, Sensors::IFOG::Arguments::psu_dev, and DUNE::Tasks::Task::war().
|
inlinevirtual |
Called when the task is instructed to initialize resources acquired previously or whose initialization depends on run-time parameters.
Reimplemented from DUNE::Tasks::Task.
References Sensors::IFOG::Arguments::input_tout, m_args, m_wdog, DUNE::Tasks::Task::setEntityState(), DUNE::Time::Counter< T >::setTop(), setTriggerFrequency(), and Sensors::IFOG::Arguments::trigger_frq.
|
inlinevirtual |
Called when the task is instructed to release resources.
Derived classes that override this function must not assume that any resource was previously acquired. This function must be implemented in such a way that it can be called at any time.
Reimplemented from DUNE::Tasks::Task.
References m_imu_escc, m_psu_ctl, m_psu_escc, and setPower().
Referenced by ~Task().
|
inlinevirtual |
Called when the task is instructed to update its run-time parameters.
Derived classes that need to compute auxiliary values based on run-time parameters should override this function.
Reimplemented from DUNE::Tasks::Task.
References DUNE::Math::Matrix::fill(), m_args, m_edelta, m_rotation, Sensors::IFOG::Arguments::rotation_mx, and Sensors::IFOG::Arguments::trigger_frq.
|
inline |
Referenced by decodeFrame().
|
inline |
References m_psu_ctl, and Sensors::IFOG::PKT_ID_PWR.
Referenced by onActivation(), onDeactivation(), and onResourceRelease().
|
inline |
References m_psu_ctl, and Sensors::IFOG::PKT_ID_TRG.
Referenced by onResourceInitialization().
| Arguments Sensors::IFOG::Task::m_args |
Task arguments.
Referenced by onResourceAcquisition(), onResourceInitialization(), onUpdateParameters(), and Task().
| IMC::EulerAnglesDelta Sensors::IFOG::Task::m_edelta |
Euler Angles Delta.
Referenced by decodeFrame(), and onUpdateParameters().
| Hardware::ESCC* Sensors::IFOG::Task::m_imu_escc |
IMU handle.
Referenced by onMain(), onResourceAcquisition(), and onResourceRelease().
| double Sensors::IFOG::Task::m_imu_time |
IMU timestamp.
| UCTK::Interface* Sensors::IFOG::Task::m_psu_ctl |
PSU handle.
Referenced by onResourceAcquisition(), onResourceRelease(), setPower(), and setTriggerFrequency().
| Hardware::ESCC* Sensors::IFOG::Task::m_psu_escc |
PSU UART.
Referenced by onResourceAcquisition(), and onResourceRelease().
| Matrix Sensors::IFOG::Task::m_rotation |
Rotation Matrix to correct IMU mounting position.
Referenced by onUpdateParameters().
| uint16_t Sensors::IFOG::Task::m_sta_fail |
Failure Status Word.
Referenced by decodeFrame(), and onMain().
| uint16_t Sensors::IFOG::Task::m_sta_imu |
IMU Status Word.
Referenced by decodeFrame(), and onMain().
| IMC::VelocityDelta Sensors::IFOG::Task::m_vdelta |
Velocity Delta.
Referenced by decodeFrame().
| Counter<float> Sensors::IFOG::Task::m_wdog |
Input Watchdog.
Referenced by onMain(), and onResourceInitialization().
 1.8.6
1.8.6