 |
DUNE: Uniform Navigational Environment
2.6.0-rc1
|
|
DUNE: Uniform Navigational Environment
2.6.0-rc1
|
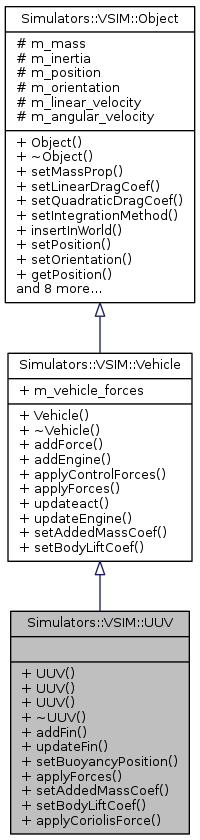
Unmanned Underwater Vehicle class.
Public Member Functions | |
| UUV (void) | |
| UUV (double position[3], double dimensions[3]) | |
| UUV (const UUV *) | |
| ~UUV (void) | |
| void | addFin (Fin *fin) |
| void | updateFin (unsigned int id, double act) |
| void | setBuoyancyPosition (double x, double y, double z) |
| void | applyForces (void) |
| virtual void | setAddedMassCoef (double coefs[6]) |
| virtual void | setBodyLiftCoef (double coefs[8]) |
| void | applyCoriolisForce (void) |
 Public Member Functions inherited from Simulators::VSIM::Vehicle Public Member Functions inherited from Simulators::VSIM::Vehicle | |
| Vehicle (void) | |
| virtual | ~Vehicle (void) |
| void | addForce (Force *force) |
| void | addEngine (Engine *engine) |
| void | applyControlForces (void) |
| void | applyForces (void) |
| void | updateact (unsigned int id, double act) |
| void | updateEngine (unsigned int id, double act) |
| Public Member Functions inherited from Simulators::VSIM::Object | |
| Object (void) | |
| virtual | ~Object (void) |
| void | setMassProp (double m, double inertia[6]) |
| void | setLinearDragCoef (double coefs[10]) |
| void | setQuadraticDragCoef (double coefs[10]) |
| void | setIntegrationMethod (bool method) |
| virtual void | insertInWorld (void) |
| virtual void | setPosition (double x, double y, double z) |
| virtual void | setOrientation (double roll, double pitch, double yaw) |
| double * | getPosition (void) |
| double * | getOrientation (void) |
| double * | getLinearVelocity (void) |
| double * | getAngularVelocity (void) |
| void | applyDragForces (void) |
| void | addForces (double X, double Y, double Z, double P, double Q, double R) |
| void | resetForces (void) |
| void | update (double timestep) |
Additional Inherited Members | |
| Public Types inherited from Simulators::VSIM::Object | |
| enum | Type { OBJECT, VEHICLE, UUV, UAV, USV, UGV } |
| Public Attributes inherited from Simulators::VSIM::Vehicle | |
| std::list< Force * > | m_vehicle_forces |
| Protected Attributes inherited from Simulators::VSIM::Object | |
| double | m_mass |
| double | m_inertia [6] |
| double | m_position [3] |
| double | m_orientation [3] |
| double | m_linear_velocity [3] |
| double | m_angular_velocity [3] |
| Simulators::VSIM::UUV::UUV | ( | void | ) |
Default Constructor.
References setBuoyancyPosition().
| Simulators::VSIM::UUV::UUV | ( | double | position[3], |
| double | dimensions[3] | ||
| ) |
Constructor.
| [in] | position | buoyancy position. |
| [in] | dimensions | volume dimensions. |
References setBuoyancyPosition().
| Simulators::VSIM::UUV::UUV | ( | const UUV * | ) |
Copy Constructor.
| Simulators::VSIM::UUV::~UUV | ( | void | ) |
Destructor.
| void Simulators::VSIM::UUV::addFin | ( | Fin * | fin | ) |
Add a fin to vehicle's configuration.
| [in] | fin | vehicle new fin. |
References Simulators::VSIM::Vehicle::addForce().
| void Simulators::VSIM::UUV::applyCoriolisForce | ( | void | ) |
Apply Coriolis Force (and Body Lift) to the UUV Coriolis Matrices equations from: "Modeling and Simulation of the LAUV Autonomous Underwater Vehicle" Jorge Estrela, Bruno Terra, Ricardo Martins e João Sousa.
References Simulators::VSIM::Object::addForces(), Simulators::VSIM::Object::m_angular_velocity, Simulators::VSIM::Object::m_inertia, Simulators::VSIM::Object::m_linear_velocity, and Simulators::VSIM::Object::m_mass.
Referenced by applyForces().
|
virtual |
Apply all forces for UUV vehicle.
Reimplemented from Simulators::VSIM::Object.
References Simulators::VSIM::Vehicle::applyControlForces(), applyCoriolisForce(), and Simulators::VSIM::Object::applyDragForces().
|
virtual |
Set added mass coefficient (useful for Coriolis matrix.
| [in] | coefs | added mass matrix coefficients. |
Reimplemented from Simulators::VSIM::Vehicle.
|
virtual |
Set body lift matrix.
| [in] | coefs | body lift matrix coefficients. |
Reimplemented from Simulators::VSIM::Vehicle.
| void Simulators::VSIM::UUV::setBuoyancyPosition | ( | double | x, |
| double | y, | ||
| double | z | ||
| ) |
Set the buoyancy position.
| [in] | x | buoyancy position in the x-axis. |
| [in] | y | buoyancy position in the y-axis. |
| [in] | z | buoyancy position in the z-axis. |
Referenced by UUV().
| void Simulators::VSIM::UUV::updateFin | ( | unsigned int | id, |
| double | act | ||
| ) |
Updates fin's actuation.
| [in] | id | fin id. |
| [in] | act | fin actuation value. |
References Simulators::VSIM::Fin::encodeId(), and Simulators::VSIM::Vehicle::updateact().
Referenced by Simulators::VSIM::Task::consume().
 1.8.6
1.8.6