 |
DUNE: Uniform Navigational Environment
2016.09.0
|
|
DUNE: Uniform Navigational Environment
2016.09.0
|
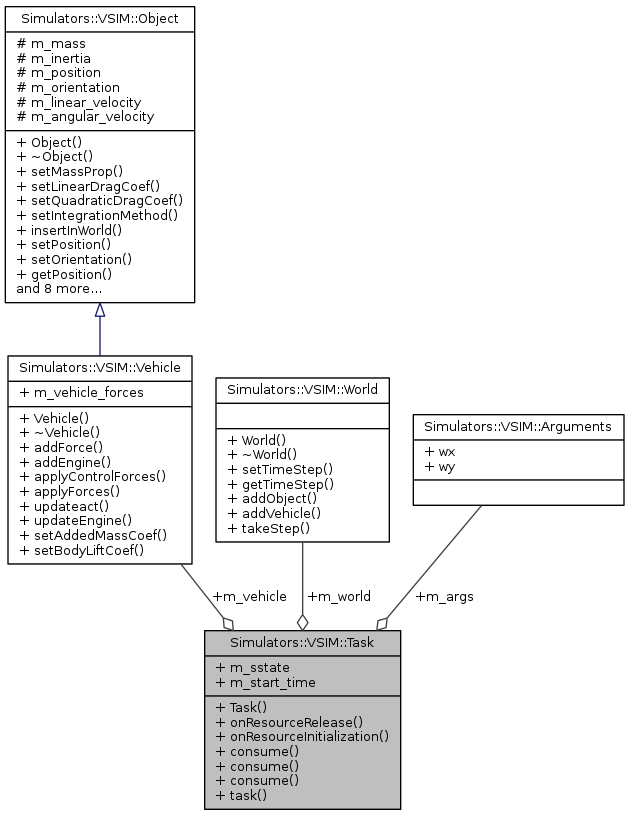
Simulator task.
Public Member Functions | |
| Task (const std::string &name, Tasks::Context &ctx) | |
| void | onResourceRelease (void) |
| void | onResourceInitialization (void) |
| void | consume (const IMC::GpsFix *msg) |
| void | consume (const IMC::ServoPosition *msg) |
| void | consume (const IMC::SetThrusterActuation *msg) |
| void | task (void) |
Public Attributes | |
| Simulators::VSIM::Vehicle * | m_vehicle |
| Simulators::VSIM::World * | m_world |
| IMC::SimulatedState | m_sstate |
| double | m_start_time |
| Arguments | m_args |
|
inline |
References m_args, Simulators::VSIM::Arguments::wx, and Simulators::VSIM::Arguments::wy.
|
inline |
|
inline |
References m_vehicle, and Simulators::VSIM::UUV::updateFin().
|
inline |
References m_vehicle, and Simulators::VSIM::Vehicle::updateEngine().
|
inline |
Initialize resources and add vehicle to the world.
References Simulators::VSIM::World::addVehicle(), m_vehicle, m_world, Simulators::VSIM::Factory::produceVehicle(), Simulators::VSIM::Factory::produceWorld(), and Simulators::VSIM::World::setTimeStep().
|
inline |
|
inline |
References Simulators::VSIM::Object::getAngularVelocity(), Simulators::VSIM::Object::getLinearVelocity(), Simulators::VSIM::Object::getOrientation(), Simulators::VSIM::Object::getPosition(), m_args, m_sstate, m_start_time, m_vehicle, m_world, Simulators::VSIM::World::takeStep(), Simulators::VSIM::Arguments::wx, and Simulators::VSIM::Arguments::wy.
| IMC::SimulatedState Simulators::VSIM::Task::m_sstate |
| Simulators::VSIM::Vehicle* Simulators::VSIM::Task::m_vehicle |
Simulation vehicle.
Referenced by consume(), onResourceInitialization(), onResourceRelease(), and task().
| Simulators::VSIM::World* Simulators::VSIM::Task::m_world |
Simulation world.
Referenced by onResourceInitialization(), onResourceRelease(), and task().
 1.8.6
1.8.6