 |
DUNE: Uniform Navigational Environment
2016.09.0
|
|
DUNE: Uniform Navigational Environment
2016.09.0
|
Public Attributes | |
| std::vector< float > | gains [LP_MAX_LOOPS] |
| float | max_int [LP_MAX_LOOPS] |
| float | max_fin_rot |
| bool | roll_control_enabled |
| float | max_pitch_act |
| float | max_pitch |
| float | extra_pitch |
| float | zref_extra |
| bool | use_depth_offset |
| float | depth_offset |
| bool | force_pitch |
| float | surface_pitch |
| float | max_hrate |
| bool | hrate_oloop |
| bool | error_attitude |
| bool | log_parcels |
| float | min_dvl_alt |
| float | min_dvl_depth |
| float | depth_threshold |
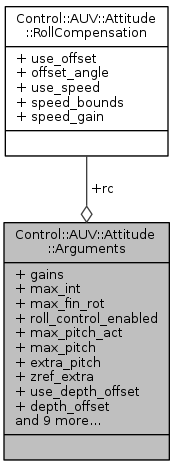
| RollCompensation | rc |
| float Control::AUV::Attitude::Arguments::depth_offset |
Depth offset value if set.
Referenced by Control::AUV::Attitude::Task::depthControl(), and Control::AUV::Attitude::Task::Task().
| float Control::AUV::Attitude::Arguments::depth_threshold |
Depth threshold to be considered surface.
Referenced by Control::AUV::Attitude::Task::depthControl(), and Control::AUV::Attitude::Task::Task().
| bool Control::AUV::Attitude::Arguments::error_attitude |
Error attitude compensation.
Referenced by Control::AUV::Attitude::Task::depthControl(), Control::AUV::Attitude::Task::headingControl(), Control::AUV::Attitude::Task::onEstimatedState(), and Control::AUV::Attitude::Task::Task().
| float Control::AUV::Attitude::Arguments::extra_pitch |
Extra pitch reference beyond maximum.
Referenced by Control::AUV::Attitude::Task::depthControl(), and Control::AUV::Attitude::Task::Task().
| bool Control::AUV::Attitude::Arguments::force_pitch |
Force positive pitch while at the surface.
Referenced by Control::AUV::Attitude::Task::depthControl(), and Control::AUV::Attitude::Task::Task().
| std::vector<float> Control::AUV::Attitude::Arguments::gains[LP_MAX_LOOPS] |
PID controller gains.
Referenced by Control::AUV::Attitude::Task::headingControl(), Control::AUV::Attitude::Task::initializePIDs(), Control::AUV::Attitude::Task::rollControl(), and Control::AUV::Attitude::Task::Task().
| bool Control::AUV::Attitude::Arguments::hrate_oloop |
Heading rate in open loop.
Referenced by Control::AUV::Attitude::Task::headingControl(), and Control::AUV::Attitude::Task::Task().
| bool Control::AUV::Attitude::Arguments::log_parcels |
Log PID gain parcels.
Referenced by Control::AUV::Attitude::Task::depthControl(), Control::AUV::Attitude::Task::initializePIDs(), Control::AUV::Attitude::Task::onEntityReservation(), and Control::AUV::Attitude::Task::Task().
| float Control::AUV::Attitude::Arguments::max_fin_rot |
Maximum fin rotation.
Referenced by Control::AUV::Attitude::Task::initializePIDs(), Control::AUV::Attitude::Task::onEstimatedState(), Control::AUV::Attitude::Task::onUpdateParameters(), and Control::AUV::Attitude::Task::Task().
| float Control::AUV::Attitude::Arguments::max_hrate |
Maximum heading rate reference for heading controller.
Referenced by Control::AUV::Attitude::Task::initializePIDs(), Control::AUV::Attitude::Task::onUpdateParameters(), and Control::AUV::Attitude::Task::Task().
| float Control::AUV::Attitude::Arguments::max_int[LP_MAX_LOOPS] |
PID integral limits.
Referenced by Control::AUV::Attitude::Task::initializePIDs(), Control::AUV::Attitude::Task::onUpdateParameters(), and Control::AUV::Attitude::Task::Task().
| float Control::AUV::Attitude::Arguments::max_pitch |
Maximum pitch reference for depth controller.
Referenced by Control::AUV::Attitude::Task::depthControl(), Control::AUV::Attitude::Task::initializePIDs(), Control::AUV::Attitude::Task::onUpdateParameters(), and Control::AUV::Attitude::Task::Task().
| float Control::AUV::Attitude::Arguments::max_pitch_act |
Maximum pitch actuation.
Referenced by Control::AUV::Attitude::Task::initializePIDs(), Control::AUV::Attitude::Task::onEstimatedState(), Control::AUV::Attitude::Task::onUpdateParameters(), and Control::AUV::Attitude::Task::Task().
| float Control::AUV::Attitude::Arguments::min_dvl_alt |
Altitude value below which altitude from DVL will be ignored.
Referenced by Control::AUV::Attitude::Task::depthControl(), and Control::AUV::Attitude::Task::Task().
| float Control::AUV::Attitude::Arguments::min_dvl_depth |
Depth value below which altitude from DVL will be ignored.
Referenced by Control::AUV::Attitude::Task::depthControl(), and Control::AUV::Attitude::Task::Task().
| RollCompensation Control::AUV::Attitude::Arguments::rc |
Roll speed compensation.
Referenced by Control::AUV::Attitude::Task::onUpdateParameters(), Control::AUV::Attitude::Task::rollControl(), and Control::AUV::Attitude::Task::Task().
| bool Control::AUV::Attitude::Arguments::roll_control_enabled |
Enable or disable roll controller.
Referenced by Control::AUV::Attitude::Task::onEstimatedState(), and Control::AUV::Attitude::Task::Task().
| float Control::AUV::Attitude::Arguments::surface_pitch |
Pitch value when forced at surface.
Referenced by Control::AUV::Attitude::Task::depthControl(), Control::AUV::Attitude::Task::onUpdateParameters(), and Control::AUV::Attitude::Task::Task().
| bool Control::AUV::Attitude::Arguments::use_depth_offset |
Use a fixed depth offset.
Referenced by Control::AUV::Attitude::Task::depthControl(), and Control::AUV::Attitude::Task::Task().
| float Control::AUV::Attitude::Arguments::zref_extra |
Vertical error to apply extra pitch.
Referenced by Control::AUV::Attitude::Task::depthControl(), and Control::AUV::Attitude::Task::Task().
 1.8.6
1.8.6