 |
DUNE: Uniform Navigational Environment
2016.09.0
|
|
DUNE: Uniform Navigational Environment
2016.09.0
|
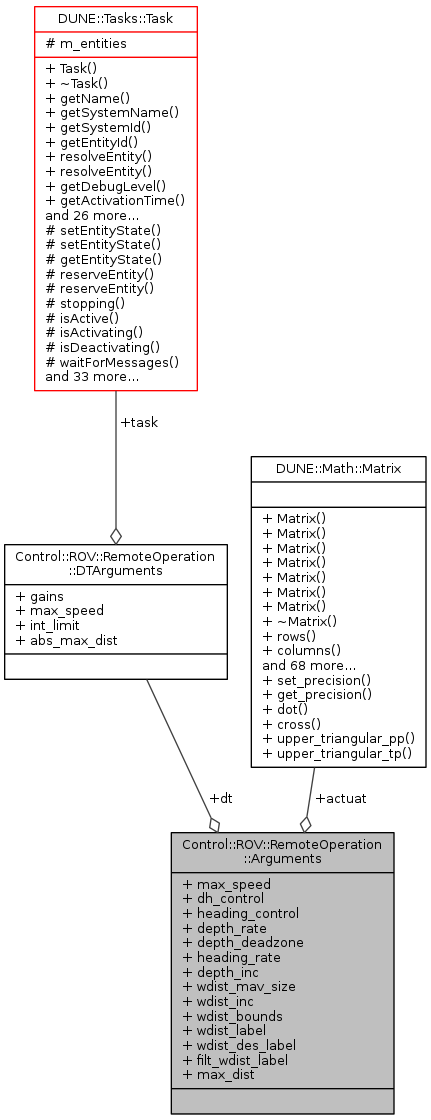
Public Attributes | |
| Matrix | actuat |
| double | max_speed |
| bool | dh_control |
| bool | heading_control |
| float | depth_rate |
| int | depth_deadzone |
| float | heading_rate |
| float | depth_inc |
| DTArguments | dt |
| unsigned | wdist_mav_size |
| float | wdist_inc |
| std::vector< float > | wdist_bounds |
| std::string | wdist_label |
| std::string | wdist_des_label |
| std::string | filt_wdist_label |
| double | max_dist |
| Matrix Control::ROV::RemoteOperation::Arguments::actuat |
| int Control::ROV::RemoteOperation::Arguments::depth_deadzone |
| float Control::ROV::RemoteOperation::Arguments::depth_inc |
| float Control::ROV::RemoteOperation::Arguments::depth_rate |
| bool Control::ROV::RemoteOperation::Arguments::dh_control |
Referenced by Control::ROV::RemoteOperation::Task::actuate(), Control::ROV::RemoteOperation::Task::onActivation(), Control::ROV::RemoteOperation::Task::onConnectionTimeout(), Control::ROV::RemoteOperation::Task::onDeactivation(), Control::ROV::RemoteOperation::Task::onRemoteActions(), and Control::ROV::RemoteOperation::Task::Task().
| DTArguments Control::ROV::RemoteOperation::Arguments::dt |
Distance tracking algorithm arguments.
Referenced by Control::ROV::RemoteOperation::Task::Task(), and Control::ROV::RemoteOperation::Task::toggleWallTracker().
| std::string Control::ROV::RemoteOperation::Arguments::filt_wdist_label |
Entity label of filtered distance to wall.
Referenced by Control::ROV::RemoteOperation::Task::onEntityReservation(), and Control::ROV::RemoteOperation::Task::Task().
| bool Control::ROV::RemoteOperation::Arguments::heading_control |
Referenced by Control::ROV::RemoteOperation::Task::actuate(), Control::ROV::RemoteOperation::Task::onActivation(), Control::ROV::RemoteOperation::Task::onConnectionTimeout(), Control::ROV::RemoteOperation::Task::onRemoteActions(), Control::ROV::RemoteOperation::Task::rotateControl(), and Control::ROV::RemoteOperation::Task::Task().
| float Control::ROV::RemoteOperation::Arguments::heading_rate |
| double Control::ROV::RemoteOperation::Arguments::max_dist |
Maximum distance threshold;.
Referenced by Control::ROV::RemoteOperation::Task::consume(), and Control::ROV::RemoteOperation::Task::Task().
| double Control::ROV::RemoteOperation::Arguments::max_speed |
| std::vector<float> Control::ROV::RemoteOperation::Arguments::wdist_bounds |
Desired distance to wall bounds (lower and upper respectively)
Referenced by Control::ROV::RemoteOperation::Task::forwardControl(), and Control::ROV::RemoteOperation::Task::Task().
| std::string Control::ROV::RemoteOperation::Arguments::wdist_des_label |
Entity label of desired distance to wall.
Referenced by Control::ROV::RemoteOperation::Task::onEntityReservation(), and Control::ROV::RemoteOperation::Task::Task().
| float Control::ROV::RemoteOperation::Arguments::wdist_inc |
Desired distance to wall increments.
Referenced by Control::ROV::RemoteOperation::Task::forwardControl(), and Control::ROV::RemoteOperation::Task::Task().
| std::string Control::ROV::RemoteOperation::Arguments::wdist_label |
Entity label of distance to wall.
Referenced by Control::ROV::RemoteOperation::Task::onEntityResolution(), and Control::ROV::RemoteOperation::Task::Task().
| unsigned Control::ROV::RemoteOperation::Arguments::wdist_mav_size |
Moving average window size for distance to wall.
Referenced by Control::ROV::RemoteOperation::Task::onResourceAcquisition(), and Control::ROV::RemoteOperation::Task::Task().
 1.8.6
1.8.6