 |
DUNE: Uniform Navigational Environment
2024.09.0
|
|
DUNE: Uniform Navigational Environment
2024.09.0
|
Public Member Functions | |
| Task (const std::string &name, Tasks::Context &ctx) | |
| void | onUpdateParameters (void) |
| bool | onConnect () override |
| void | onDisconnect () override |
| bool | onSynchronize () override |
| void | onInitializeDevice () override |
| int | readString (void) |
| bool | setParameter (const char *command, const char *label, int value) |
| void | changeCalibrationState (CalibrationStates state) |
| void | consume (const IMC::DevCalibrationControl *msg) |
| void | calibrating (void) |
| void | terminateCalibration (void) |
| bool | onReadData () override |
Public Attributes | |
| SerialPort * | m_uart |
| IMC::EulerAngles | m_euler |
| IMC::MagneticField | m_mag |
| IMC::Acceleration | m_accel |
| IMC::Temperature | m_temp |
| IMC::DevCalibrationState | m_states [STA_MAX] |
| CalibrationStates | m_state |
| int | m_accumulator |
| char | m_bfr [c_bfr_size] |
| double | m_tstamp |
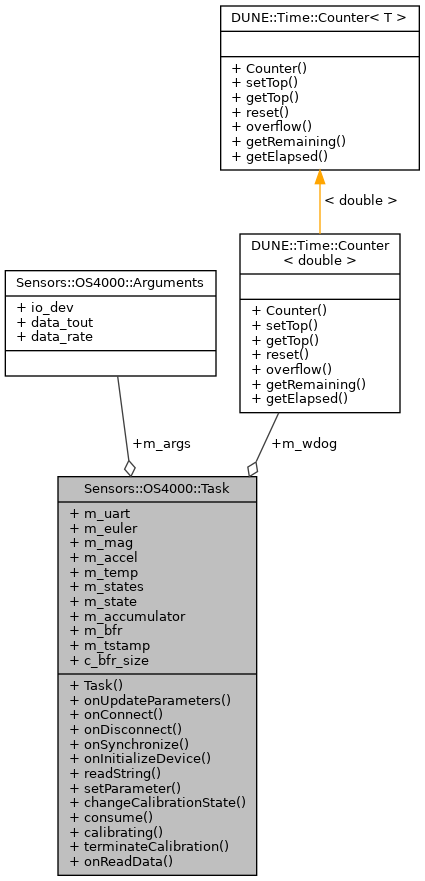
| Arguments | m_args |
| Counter< double > | m_wdog |
Static Public Attributes | |
| static const unsigned | c_bfr_size |
|
inline |
References Sensors::OS4000::Arguments::data_rate, Sensors::OS4000::Arguments::data_tout, Sensors::OS4000::Arguments::io_dev, Sensors::OS4000::STA_BOOT, Sensors::OS4000::STA_CALIBRATED, Sensors::OS4000::STA_ERROR, Sensors::OS4000::STA_NUM_STEPS, Sensors::OS4000::STA_ROTATE, and Sensors::OS4000::STA_WAIT_LEVEL.
|
inline |
References Sensors::OS4000::STA_CALIBRATED.
|
inline |
Change calibration state.
| [in] | state | calibration state. |
|
inline |
|
inlineoverride |
Try to connect to the device.
References Sensors::OS4000::Arguments::io_dev.
|
inlineoverride |
Disconnect from device.
|
inlineoverride |
Device may be initialized.
|
inlineoverride |
Get data from device.
References Sensors::OS4000::STA_ROTATE, and Sensors::OS4000::STA_WAIT_LEVEL.
|
inlineoverride |
Synchronize with device.
References Sensors::OS4000::Arguments::data_rate, and Sensors::OS4000::STA_BOOT.
|
inline |
Update Task parameters.
References Sensors::OS4000::Arguments::data_tout.
|
inline |
Read a string from the serial port,.
|
inline |
Define a given parameter in the device.
| [in] | command | input command. |
| [in] | label | label of the parameter. |
| [in] | value | value of the parameter. |
|
inline |
|
static |
Internal read buffer.
| IMC::Acceleration Sensors::OS4000::Task::m_accel |
Acceleration message.
| int Sensors::OS4000::Task::m_accumulator |
Calibration characters accumulator.
| char Sensors::OS4000::Task::m_bfr[c_bfr_size] |
Internal read buffer.
| IMC::EulerAngles Sensors::OS4000::Task::m_euler |
Euler angles message.
| IMC::MagneticField Sensors::OS4000::Task::m_mag |
Magnetic field message.
| CalibrationStates Sensors::OS4000::Task::m_state |
Calibration states.
| IMC::DevCalibrationState Sensors::OS4000::Task::m_states[STA_MAX] |
Device Calibration State message.
| IMC::Temperature Sensors::OS4000::Task::m_temp |
Temperature.
| double Sensors::OS4000::Task::m_tstamp |
Read timestamp.
| SerialPort* Sensors::OS4000::Task::m_uart |
Serial port.
| Counter<double> Sensors::OS4000::Task::m_wdog |
Watchdog.
 1.8.13
1.8.13