Development Messages¶
Target¶
Target.
- Abbreviation: Target
- Identification Number: 800
- Fixed Payload Size: 0
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Label | label | - | plaintext | Target identifier. | Same as field type |
| Latitude WGS-84 | lat | rad | fp64_t | WGS-84 Latitude coordinate. | Same as field type |
| Longitude WGS-84 | lon | rad | fp64_t | WGS-84 Longitude coordinate. | Same as field type |
| Z Reference | z | m | fp32_t | Z axis reference. Use z_units to specify whether z represents depth, altitude or other. | Same as field type |
| Z Units | z_units | Enumerated | uint8_t | Units of the z reference. | Same as field type |
| Course Over Ground | cog | rad | fp32_t | Course Over Ground (true). | Same as field type |
| Speed Over Ground | sog | m/s | fp32_t | Speed Over Ground. | Same as field type |
EntityParameter¶
Entity parameter.
- Abbreviation: EntityParameter
- Identification Number: 801
- Fixed Payload Size: 0
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Name | name | - | plaintext | Name of the parameter. | Same as field type |
| Value | value | - | plaintext | Current value of the parameter. | Same as field type |
EntityParameters¶
List of entity parameters.
- Abbreviation: EntityParameters
- Identification Number: 802
- Fixed Payload Size: 0
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Entity Name | name | - | plaintext | Name of the entity. | Same as field type |
| Parameters | params | - | message-list | List of parameters. | Same as field type |
QueryEntityParameters¶
No description
- Abbreviation: QueryEntityParameters
- Identification Number: 803
- Fixed Payload Size: 0
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Entity Name | name | - | plaintext | Same as field type | |
| Visibility | visibility | - | plaintext | Same as field type | |
| Scope | scope | - | plaintext | Same as field type |
SetEntityParameters¶
No description
- Abbreviation: SetEntityParameters
- Identification Number: 804
- Fixed Payload Size: 0
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Entity Name | name | - | plaintext | Same as field type | |
| Parameters | params | - | message-list | Same as field type |
SaveEntityParameters¶
No description
- Abbreviation: SaveEntityParameters
- Identification Number: 805
- Fixed Payload Size: 0
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Entity Name | name | - | plaintext | Same as field type |
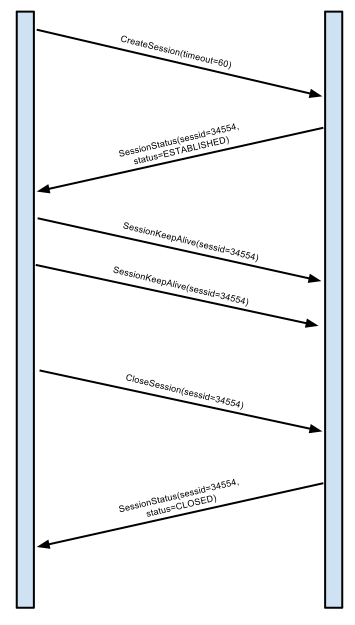
Create Session¶
Request creating a new session with this remote peer. Example session sequence is shown in the following diagram.
| align: | center |
|---|
- Abbreviation: CreateSession
- Identification Number: 806
- Fixed Payload Size: 0
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Session Timeout | timeout | - | uint32_t | Session timeout, in seconds. If no messages are received from the remote peer, the session will be closed after this ammount of seconds have ellapsed. | Same as field type |
Close Session¶
Request closing of an ongoing session
- Abbreviation: CloseSession
- Identification Number: 807
- Fixed Payload Size: 0
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Session Identifier | sessid | - | uint32_t | Same as field type |
Session Subscription¶
No description
- Abbreviation: SessionSubscription
- Identification Number: 808
- Fixed Payload Size: 0
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Session Identifier | sessid | - | uint32_t | Same as field type | |
| Messages to subscribe | messages | - | plaintext | Comma-separated list of messages to subscribe. Example: “EstimatedState,EulerAngles,Temperature” | Same as field type |
Session Keep-Alive¶
Message exchanged to prevent a session from timing out
- Abbreviation: SessionKeepAlive
- Identification Number: 809
- Fixed Payload Size: 0
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Session Identifier | sessid | - | uint32_t | Same as field type |
Session Status¶
Message transmitted periodically to inform the state of a communication session
- Abbreviation: SessionStatus
- Identification Number: 810
- Fixed Payload Size: 0
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Session Identifier | sessid | - | uint32_t | Same as field type | |
| Status | status | Enumerated | uint8_t | Same as field type |
Push Entity Parameters¶
No description
- Abbreviation: PushEntityParameters
- Identification Number: 811
- Fixed Payload Size: 0
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Entity Name | name | - | plaintext | Same as field type |
Pop Entity Parameters¶
No description
- Abbreviation: PopEntityParameters
- Identification Number: 812
- Fixed Payload Size: 0
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Entity Name | name | - | plaintext | Same as field type |
I/O Event¶
Notification of an I/O event.
- Abbreviation: IoEvent
- Identification Number: 813
- Fixed Payload Size: 0
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Type | type | Enumerated | uint8_t | Event type. | Same as field type |
| Error Message | error | - | plaintext | Human-readable error message. | Same as field type |
UamTxFrame¶
No description
- Abbreviation: UamTxFrame
- Identification Number: 814
- Fixed Payload Size: 0
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Sequence Id | seq | - | uint16_t | Same as field type | |
| Destination System | sys_dst | - | plaintext | Same as field type | |
| Flags | flags | Bitfield | uint8_t | Same as field type | |
| Data | data | - | rawdata | Same as field type |
UamRxFrame¶
No description
- Abbreviation: UamRxFrame
- Identification Number: 815
- Fixed Payload Size: 0
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Source System | sys_src | - | plaintext | Same as field type | |
| Destination System | sys_dst | - | plaintext | Same as field type | |
| Flags | flags | Bitfield | uint8_t | Same as field type | |
| Data | data | - | rawdata | Same as field type |
UamTxStatus¶
No description
- Abbreviation: UamTxStatus
- Identification Number: 816
- Fixed Payload Size: 0
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Sequence Id | seq | - | uint16_t | Same as field type | |
| Value | value | Enumerated | uint8_t | Same as field type | |
| Error Message | error | - | plaintext | Same as field type |
UamRxRange¶
No description
- Abbreviation: UamRxRange
- Identification Number: 817
- Fixed Payload Size: 0
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Sequence Id | seq | - | uint16_t | Same as field type | |
| System | sys | - | plaintext | Same as field type | |
| Value | value | - | fp32_t | Same as field type |
Abort Acknowledged¶
An ‘Abort’ message was received and acted upon.
- Abbreviation: AbortAcked
- Identification Number: 818
- Fixed Payload Size: 0
This message has no fields.
Formation Control Parameters¶
Formation controller paramenters, as: trajectory gains, control boundary layer thickness, and formation shape gains.
- Abbreviation: FormCtrlParam
- Identification Number: 820
- Fixed Payload Size: 0
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Action | Action | Enumerated | uint8_t | Action on the vehicle formation control parameters. | Same as field type |
| Longitudinal Gain | LonGain | - | uint32_t | Trajectory gain over the vehicle longitudinal direction. | Same as field type |
| Lateral Gain | LatGain | - | uint32_t | Trajectory gain over the vehicle lateral direction. | Same as field type |
| Boundary Layer Thickness | BondThick | - | uint32_t | Control sliding surface boundary layer thickness. | Same as field type |
| Leader Gain | LeadGain | - | uint32_t | Formation shape gain (absolute vehicle position tracking). Leader control importance gain (relative to the sum of every other formation vehicle). | Same as field type |
| Deconfliction Gain | DeconflGain | - | uint32_t | Collision avoidance and formation shape gain (position tracking relative to the other formation vehicles). Individual vehicle importance gain (relative to the leader), when the relative position or the velocity state indicate higher probability of collision. | Same as field type |