 |
DUNE: Uniform Navigational Environment
2016.05.0
|
|
DUNE: Uniform Navigational Environment
2016.05.0
|
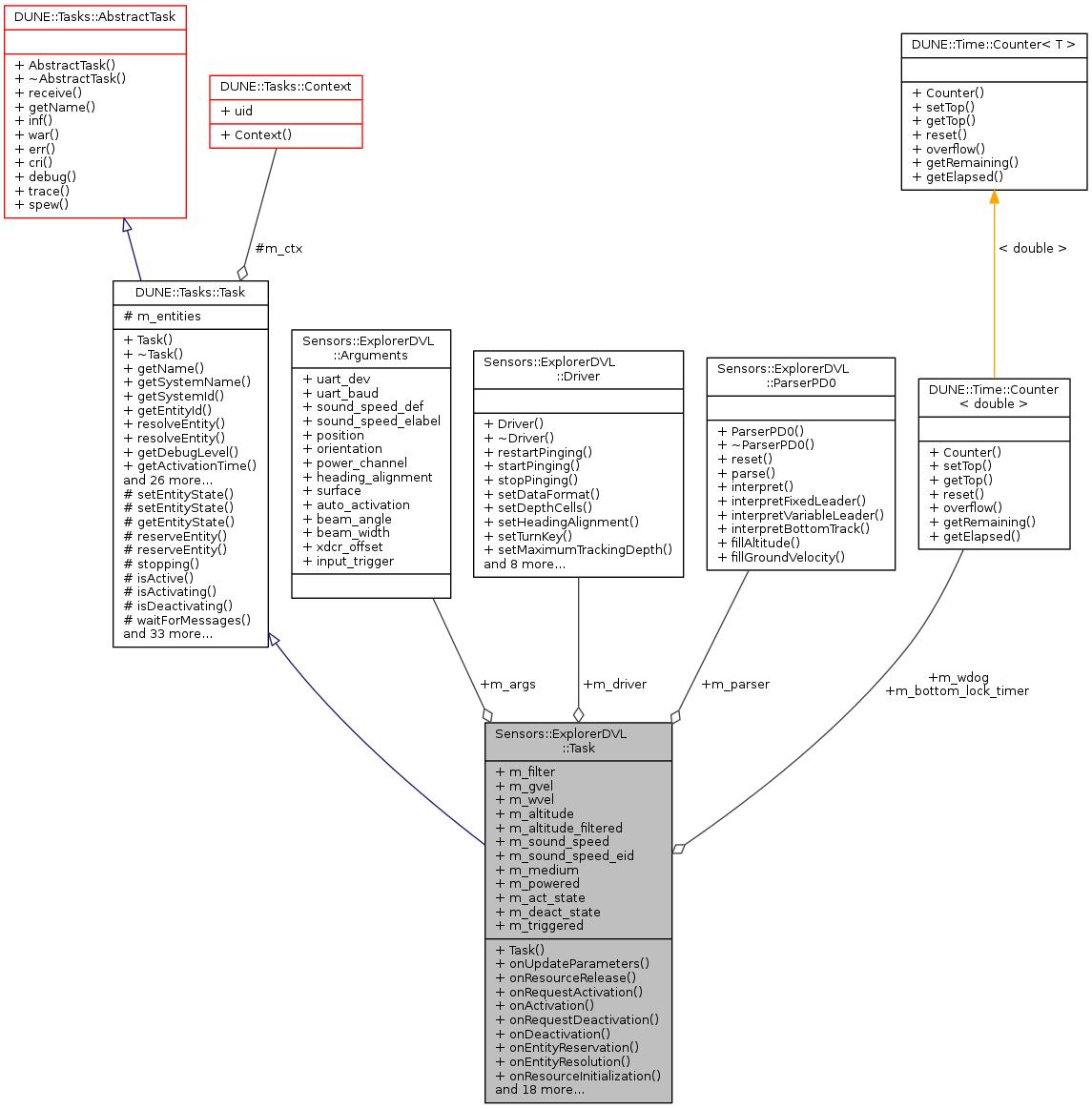
Task.
Public Member Functions | |
| Task (const std::string &name, Tasks::Context &ctx) | |
| void | onUpdateParameters (void) |
| void | onResourceRelease (void) |
| void | onRequestActivation (void) |
| void | onActivation (void) |
| void | onRequestDeactivation (void) |
| void | onDeactivation (void) |
| void | onEntityReservation (void) |
| void | onEntityResolution (void) |
| void | onResourceInitialization (void) |
| void | consume (const IMC::PulseDetectionControl *msg) |
| void | consume (const IMC::VehicleMedium *msg) |
| void | consume (const IMC::SoundSpeed *msg) |
| void | consume (const IMC::PowerChannelState *msg) |
| bool | setInputTrigger (bool enabled) |
| void | configureInputTrigger (bool value) |
| bool | canRequestActivation (void) |
| void | controlPower (IMC::PowerChannelControl::OperationEnum op) |
| void | turnPowerOn (void) |
| void | turnPowerOff (void) |
| void | processAltitude (void) |
| void | processGroundVelocity (void) |
| bool | readSample (uint8_t *bfr, size_t bfr_size) |
| bool | setup (void) |
| void | dispatchStats (void) |
| bool | runActivationStateMachine (void) |
| bool | runDeactivationStateMachine (void) |
| void | onMain (void) |
 Public Member Functions inherited from DUNE::Tasks::Task Public Member Functions inherited from DUNE::Tasks::Task | |
| Task (const std::string &name, Context &context) | |
| virtual | ~Task (void) |
| const char * | getName (void) const |
| const char * | getSystemName (void) const |
| unsigned int | getSystemId (void) const |
| unsigned int | getEntityId (void) const |
| unsigned int | resolveEntity (const std::string &label) const |
| std::string | resolveEntity (unsigned int id) const |
| DebugLevel | getDebugLevel (void) const |
| uint16_t | getActivationTime (void) const |
| uint16_t | getDeactivationTime (void) const |
| unsigned int | resolveSystemName (const std::string &name) const |
| const char * | resolveSystemId (unsigned int id) const |
| void | loadConfig (void) |
| void | setPriority (unsigned int value) |
| unsigned int | getPriority (void) const |
| void | inf (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void | war (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void void | err (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void void void | cri (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void void void void | debug (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void void void void void | trace (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void void void void void void | spew (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void void void void void void void | dispatch (IMC::Message *msg, unsigned int flags=0) |
| void | dispatch (IMC::Message &msg, unsigned int flags=0) |
| void | dispatchReply (const IMC::Message &original, IMC::Message &msg, unsigned int flags=0) |
| void | receive (const IMC::Message *msg) |
| void | reserveEntities (void) |
| void | resolveEntities (void) |
| void | acquireResources (void) |
| void | releaseResources (void) |
| void | initializeResources (void) |
| void | updateParameters (bool act_deact=true) |
| void | writeParamsXML (std::ostream &os) const |
| const char * | getEntityLabel (void) const |
| void | setEntityLabel (const std::string &label) |
| Public Member Functions inherited from DUNE::Tasks::AbstractTask | |
| AbstractTask (void) | |
| virtual | ~AbstractTask (void) |
| Public Member Functions inherited from DUNE::Concurrency::Thread | |
| Thread (void) | |
| virtual | ~Thread (void) |
| int | getProcessorUsage (void) |
| Public Member Functions inherited from DUNE::Concurrency::Runnable | |
| Runnable (void) | |
| virtual | ~Runnable (void) |
| void | start (void) |
| void | stop (void) |
| void | join (void) |
| void | stopAndJoin (void) |
| void | setPriority (Scheduler::Policy policy, unsigned priority) |
| State | getState (void) |
| bool | isCreated (void) |
| bool | isStopping (void) |
| bool | isRunning (void) |
| bool | isStarting (void) |
| bool | isDead (void) |
Public Attributes | |
| Driver * | m_driver |
| Navigation::BeamFilter | m_filter |
| IMC::GroundVelocity | m_gvel |
| IMC::WaterVelocity | m_wvel |
| IMC::Distance | m_altitude [c_beam_count] |
| IMC::Distance | m_altitude_filtered |
| double | m_sound_speed |
| int | m_sound_speed_eid |
| Monitors::MediumHandler | m_medium |
| ParserPD0 | m_parser |
| bool | m_powered |
| ActivationState | m_act_state |
| DeactivationState | m_deact_state |
| Counter< double > | m_wdog |
| Counter< double > | m_bottom_lock_timer |
| bool | m_triggered |
| Arguments | m_args |
Additional Inherited Members | |
| Public Types inherited from DUNE::Concurrency::Runnable | |
| enum | State { StateStarting, StateRunning, StateStopping, StateDead, StateUnknown } |
| Protected Member Functions inherited from DUNE::Tasks::Task | |
| void | setEntityState (IMC::EntityState::StateEnum state, Status::Code code) |
| void | setEntityState (IMC::EntityState::StateEnum state, const std::string &description) |
| IMC::EntityState::StateEnum | getEntityState (void) const |
| unsigned int | reserveEntity (const std::string &label) |
| template<typename E > | |
| E * | reserveEntity (const std::string &label) |
| bool | stopping (void) |
| bool | isActive (void) const |
| bool | isActivating (void) const |
| bool | isDeactivating (void) const |
| void | waitForMessages (double timeout) |
| void | consumeMessages (void) |
| template<typename T > | |
| Parameter & | param (const std::string &name, T &var) |
| template<typename Y , typename T > | |
| Parameter & | param (const std::string &name, T &var) |
| template<typename T > | |
| bool | paramChanged (T &var) |
| void | paramActive (Parameter::Scope def_scope, Parameter::Visibility def_visibility, bool def_value=false) |
| void | setParamSectionEditor (const std::string &name) |
| template<typename M , typename T > | |
| void | bind (T *task_obj, void(T::*consumer)(const M *)=&T::consume) |
| template<typename T > | |
| void | bind (T *task_obj, const std::vector< uint32_t > &list) |
| template<typename T , typename M > | |
| void | bind (T *task_obj, const std::vector< uint32_t > &list, void(T::*consumer)(const M *)=&T::consume) |
| template<typename T > | |
| void | bind (T *task_obj, const std::vector< std::string > &list) |
| void | requestActivation (void) |
| void | requestDeactivation (void) |
| void | activate (void) |
| void | activationFailed (const std::string &reason) |
| void | deactivate (void) |
| void | deactivationFailed (const std::string &reason) |
| virtual bool | onWriteParamsXML (std::ostream &os) const |
| virtual void | onReportEntityState (void) |
| virtual void | onResourceAcquisition (void) |
| virtual void | onQueryEntityParameters (const IMC::QueryEntityParameters *msg) |
| virtual void | onSetEntityParameters (const IMC::SetEntityParameters *msg) |
| virtual void | onPushEntityParameters (const IMC::PushEntityParameters *msg) |
| virtual void | onPopEntityParameters (const IMC::PopEntityParameters *msg) |
| Protected Member Functions inherited from DUNE::Concurrency::Thread | |
| void | startImpl (void) |
| void | stopImpl (void) |
| void | joinImpl (void) |
| void | setPriorityImpl (Scheduler::Policy policy, unsigned priority) |
| Protected Attributes inherited from DUNE::Tasks::Task | |
| Context & | m_ctx |
| std::vector < Entities::BasicEntity * > | m_entities |
|
inline |
References Sensors::ExplorerDVL::Arguments::auto_activation, Sensors::ExplorerDVL::Arguments::beam_angle, Sensors::ExplorerDVL::Arguments::beam_width, DUNE::Tasks::Parameter::defaultValue(), DUNE::Tasks::Parameter::description(), Sensors::ExplorerDVL::Arguments::heading_alignment, Sensors::ExplorerDVL::Arguments::input_trigger, m_args, Sensors::ExplorerDVL::Arguments::orientation, DUNE::Tasks::Task::param(), DUNE::Tasks::Task::paramActive(), Sensors::ExplorerDVL::Arguments::position, Sensors::ExplorerDVL::Arguments::power_channel, Sensors::ExplorerDVL::Arguments::sound_speed_def, Sensors::ExplorerDVL::Arguments::sound_speed_elabel, Sensors::ExplorerDVL::Arguments::surface, Sensors::ExplorerDVL::Arguments::uart_baud, Sensors::ExplorerDVL::Arguments::uart_dev, and Sensors::ExplorerDVL::Arguments::xdcr_offset.
|
inline |
Test if the task can request activation.
References DUNE::Tasks::Task::isActivating(), and DUNE::Tasks::Task::isActive().
Referenced by consume().
|
inline |
|
inline |
|
inline |
|
inline |
References m_sound_speed, and m_sound_speed_eid.
|
inline |
References DUNE::Tasks::Task::debug(), m_args, m_powered, and Sensors::ExplorerDVL::Arguments::power_channel.
|
inline |
References DUNE::Tasks::Task::dispatch(), m_args, and Sensors::ExplorerDVL::Arguments::power_channel.
Referenced by turnPowerOff(), and turnPowerOn().
|
inline |
References Sensors::ExplorerDVL::Driver::getTimeoutCount(), and m_driver.
Referenced by setup().
|
inlinevirtual |
Called when the task starts/resumes normal execution.
Reimplemented from DUNE::Tasks::Task.
References m_bottom_lock_timer, m_wdog, DUNE::Tasks::Task::setEntityState(), and DUNE::Time::Counter< T >::setTop().
|
inlinevirtual |
Called when the task stops normal execution and enters an idleness state.
Reimplemented from DUNE::Tasks::Task.
References DUNE::Tasks::Task::setEntityState().
|
inlinevirtual |
Called when the task is instructed to reserve all the entity identifiers it needs for normal execution.
See reserveEntity(). Derived classes that need to reserve entity identifiers other than that of the main entity should override this function.
Reimplemented from DUNE::Tasks::Task.
References m_altitude, m_altitude_filtered, and DUNE::Tasks::Task::reserveEntity().
|
inlinevirtual |
Called when the task is instructed to resolve all the entity identifiers it needs for normal execution.
See resolveEntity(). Derived classes that need to resolve entity identifiers should override this function.
Reimplemented from DUNE::Tasks::Task.
References m_args, m_sound_speed, m_sound_speed_eid, DUNE::Tasks::Task::resolveEntity(), Sensors::ExplorerDVL::Arguments::sound_speed_def, and Sensors::ExplorerDVL::Arguments::sound_speed_elabel.
|
inlinevirtual |
Implements DUNE::Tasks::Task.
References DUNE::Tasks::Task::activate(), DUNE::Tasks::Task::activationFailed(), DUNE::Tasks::Task::consumeMessages(), DUNE::Tasks::Task::deactivate(), DUNE::Tasks::Task::deactivationFailed(), DUNE::Time::Counter< T >::getElapsed(), DUNE::Tasks::Task::isActivating(), DUNE::Tasks::Task::isActive(), DUNE::Tasks::Task::isDeactivating(), m_bottom_lock_timer, m_driver, m_wdog, DUNE::Time::Counter< T >::overflow(), readSample(), DUNE::Tasks::Task::requestActivation(), DUNE::Tasks::Task::requestDeactivation(), DUNE::Time::Counter< T >::reset(), Sensors::ExplorerDVL::Driver::restartPinging(), runActivationStateMachine(), runDeactivationStateMachine(), DUNE::Tasks::Task::setEntityState(), DUNE::Tasks::Task::stopping(), DUNE::Tasks::Task::trace(), and DUNE::Tasks::Task::waitForMessages().
|
inlinevirtual |
Called when an external activation request is received.
Derived classes that need to perform extra steps to prepare normal execution should replace the default behaviour of immediate activation with calls to activate() when the request is completed or activationFailed() if the request cannot be honoured.
Reimplemented from DUNE::Tasks::Task.
References m_act_state, and Sensors::ExplorerDVL::ST_ACT_BEGIN.
|
inlinevirtual |
Called when an external deactivation request is received.
Derived classes that need to perform extra steps to prepare normal execution should replace the default behaviour of immediate deactivation with calls to deactivate() when the request is completed or deactivationFailed() if the request cannot be honoured.
Reimplemented from DUNE::Tasks::Task.
References m_deact_state, and Sensors::ExplorerDVL::ST_DEACT_BEGIN.
|
inlinevirtual |
Called when the task is instructed to initialize resources acquired previously or whose initialization depends on run-time parameters.
Reimplemented from DUNE::Tasks::Task.
References DUNE::Tasks::Task::setEntityState().
|
inlinevirtual |
Called when the task is instructed to release resources.
Derived classes that override this function must not assume that any resource was previously acquired. This function must be implemented in such a way that it can be called at any time.
Reimplemented from DUNE::Tasks::Task.
References m_driver.
|
inlinevirtual |
Called when the task is instructed to update its run-time parameters.
Derived classes that need to compute auxiliary values based on run-time parameters should override this function.
Reimplemented from DUNE::Tasks::Task.
References Sensors::ExplorerDVL::Arguments::beam_angle, Sensors::ExplorerDVL::Arguments::beam_width, Sensors::ExplorerDVL::Arguments::heading_alignment, m_altitude, m_altitude_filtered, m_args, m_powered, m_sound_speed, Sensors::ExplorerDVL::Arguments::orientation, DUNE::Tasks::Task::paramChanged(), Sensors::ExplorerDVL::Arguments::position, Sensors::ExplorerDVL::Arguments::power_channel, Sensors::ExplorerDVL::Arguments::sound_speed_def, and Sensors::ExplorerDVL::Arguments::xdcr_offset.
|
inline |
|
inline |
References DUNE::Tasks::Task::dispatch(), Sensors::ExplorerDVL::ParserPD0::fillGroundVelocity(), m_gvel, m_parser, and m_sound_speed.
Referenced by readSample().
|
inline |
References DUNE::Tasks::Task::dispatch(), m_driver, m_parser, Sensors::ExplorerDVL::ParserPD0::parse(), processAltitude(), processGroundVelocity(), and Sensors::ExplorerDVL::Driver::readData().
Referenced by onMain().
|
inline |
References m_act_state, m_powered, DUNE::Tasks::Task::setEntityState(), setup(), Sensors::ExplorerDVL::ST_ACT_BEGIN, Sensors::ExplorerDVL::ST_ACT_DONE, Sensors::ExplorerDVL::ST_ACT_SETUP, Sensors::ExplorerDVL::ST_ACT_TURN_ON, Sensors::ExplorerDVL::ST_ACT_TURN_ON_WAIT, DUNE::Tasks::Task::trace(), turnPowerOn(), and DUNE::Tasks::Task::waitForMessages().
Referenced by onMain().
|
inline |
References m_deact_state, m_powered, DUNE::Tasks::Task::setEntityState(), Sensors::ExplorerDVL::ST_DEACT_BEGIN, Sensors::ExplorerDVL::ST_DEACT_DONE, Sensors::ExplorerDVL::ST_DEACT_TURN_OFF, Sensors::ExplorerDVL::ST_DEACT_TURN_OFF_WAIT, DUNE::Tasks::Task::trace(), turnPowerOff(), and DUNE::Tasks::Task::waitForMessages().
Referenced by onMain().
|
inline |
|
inline |
References DUNE::Tasks::Task::consumeMessages(), DUNE::Tasks::Task::debug(), dispatchStats(), Sensors::ExplorerDVL::Arguments::heading_alignment, m_args, m_driver, m_parser, m_triggered, Sensors::ExplorerDVL::ParserPD0::reset(), Sensors::ExplorerDVL::Driver::setBottomTrackPingsPerEnsemble(), Sensors::ExplorerDVL::Driver::setDataFormat(), Sensors::ExplorerDVL::Driver::setEarthCoordinates(), Sensors::ExplorerDVL::Driver::setHeadingAlignment(), setInputTrigger(), Sensors::ExplorerDVL::Driver::setManualSensorSource(), Sensors::ExplorerDVL::Driver::setMaximumTrackingDepth(), Sensors::ExplorerDVL::Driver::setSoundSpeed(), Sensors::ExplorerDVL::Driver::setTimeout(), Sensors::ExplorerDVL::Driver::setTurnKey(), Sensors::ExplorerDVL::Arguments::sound_speed_def, Sensors::ExplorerDVL::Driver::startPinging(), Sensors::ExplorerDVL::Driver::stopPinging(), DUNE::Tasks::Task::trace(), Sensors::ExplorerDVL::Arguments::uart_baud, and Sensors::ExplorerDVL::Arguments::uart_dev.
Referenced by runActivationStateMachine().
|
inline |
References controlPower().
Referenced by runDeactivationStateMachine().
|
inline |
References controlPower().
Referenced by runActivationStateMachine().
| ActivationState Sensors::ExplorerDVL::Task::m_act_state |
Activation state machine state.
Referenced by onRequestActivation(), and runActivationStateMachine().
| IMC::Distance Sensors::ExplorerDVL::Task::m_altitude[c_beam_count] |
Measured Altitudes.
Referenced by onEntityReservation(), onUpdateParameters(), and processAltitude().
| IMC::Distance Sensors::ExplorerDVL::Task::m_altitude_filtered |
Filtered Altitude.
Referenced by onEntityReservation(), onUpdateParameters(), and processAltitude().
| Arguments Sensors::ExplorerDVL::Task::m_args |
Task arguments.
Referenced by consume(), controlPower(), onEntityResolution(), onUpdateParameters(), setup(), and Task().
| Counter<double> Sensors::ExplorerDVL::Task::m_bottom_lock_timer |
Bottom Lock Watchdog.
Referenced by configureInputTrigger(), onActivation(), onMain(), and processAltitude().
| DeactivationState Sensors::ExplorerDVL::Task::m_deact_state |
Deactivation state machine state.
Referenced by onRequestDeactivation(), and runDeactivationStateMachine().
| Driver* Sensors::ExplorerDVL::Task::m_driver |
Referenced by configureInputTrigger(), consume(), dispatchStats(), onMain(), onResourceRelease(), readSample(), setInputTrigger(), and setup().
| Navigation::BeamFilter Sensors::ExplorerDVL::Task::m_filter |
Beam Filter.
Referenced by processAltitude().
| IMC::GroundVelocity Sensors::ExplorerDVL::Task::m_gvel |
Ground velocity message.
Referenced by processGroundVelocity().
| Monitors::MediumHandler Sensors::ExplorerDVL::Task::m_medium |
Medium monitor.
Referenced by consume().
| ParserPD0 Sensors::ExplorerDVL::Task::m_parser |
PD0 format parser.
Referenced by processAltitude(), processGroundVelocity(), readSample(), and setup().
| bool Sensors::ExplorerDVL::Task::m_powered |
True if device is powered.
Referenced by consume(), onUpdateParameters(), runActivationStateMachine(), and runDeactivationStateMachine().
| double Sensors::ExplorerDVL::Task::m_sound_speed |
Last sound speed value.
Referenced by consume(), onEntityResolution(), onUpdateParameters(), processAltitude(), and processGroundVelocity().
| int Sensors::ExplorerDVL::Task::m_sound_speed_eid |
Sound speed entity id.
Referenced by consume(), and onEntityResolution().
| bool Sensors::ExplorerDVL::Task::m_triggered |
| Counter<double> Sensors::ExplorerDVL::Task::m_wdog |
Watchdog.
Referenced by onActivation(), and onMain().
| IMC::WaterVelocity Sensors::ExplorerDVL::Task::m_wvel |
Water velocity message.
 1.8.6
1.8.6