 |
DUNE: Uniform Navigational Environment
2016.09.0
|
|
DUNE: Uniform Navigational Environment
2016.09.0
|
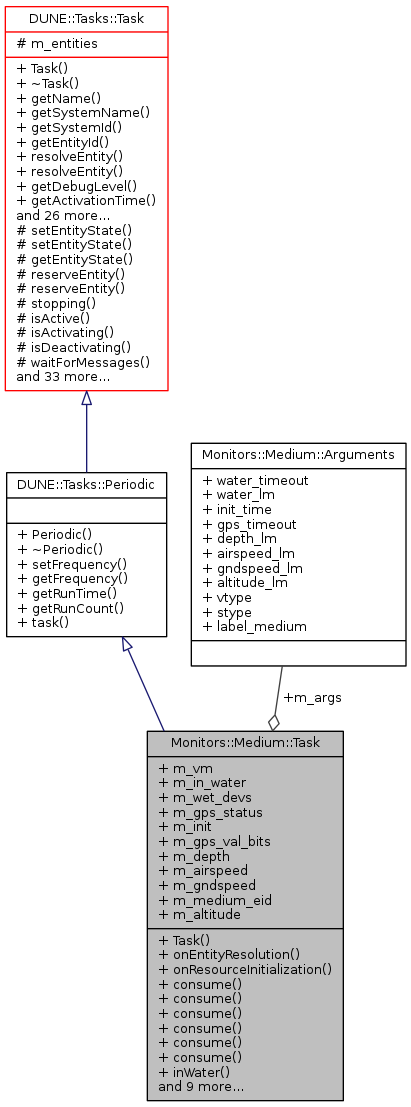
Medium task.
Public Member Functions | |
| Task (const std::string &name, Tasks::Context &ctx) | |
| void | onEntityResolution (void) |
| void | onResourceInitialization (void) |
| void | consume (const IMC::EntityState *msg) |
| void | consume (const IMC::EstimatedState *msg) |
| void | consume (const IMC::IndicatedSpeed *msg) |
| void | consume (const IMC::GpsFix *msg) |
| void | consume (const IMC::Salinity *msg) |
| void | consume (const IMC::SoundSpeed *msg) |
| bool | inWater (void) |
| bool | isGpsAvailable (void) |
| void | checkWater (void) |
| void | checkUUV (void) |
| void | checkUAV (void) |
| bool | isCopter (void) |
| bool | isUAV (void) |
| bool | waterMediumCheck (void) |
| void | updateStateMachine (void) |
| void | task (void) |
 Public Member Functions inherited from DUNE::Tasks::Periodic Public Member Functions inherited from DUNE::Tasks::Periodic | |
| Periodic (const std::string &name, Context &ctx) | |
| virtual | ~Periodic (void) |
| void | setFrequency (double freq) |
| double | getFrequency (void) const |
| double | getRunTime (void) const |
| unsigned | getRunCount (void) const |
| Public Member Functions inherited from DUNE::Tasks::Task | |
| Task (const std::string &name, Context &context) | |
| virtual | ~Task (void) |
| const char * | getName (void) const |
| const char * | getSystemName (void) const |
| unsigned int | getSystemId (void) const |
| unsigned int | getEntityId (void) const |
| unsigned int | resolveEntity (const std::string &label) const |
| std::string | resolveEntity (unsigned int id) const |
| DebugLevel | getDebugLevel (void) const |
| uint16_t | getActivationTime (void) const |
| uint16_t | getDeactivationTime (void) const |
| unsigned int | resolveSystemName (const std::string &name) const |
| const char * | resolveSystemId (unsigned int id) const |
| void | loadConfig (void) |
| void | setPriority (unsigned int value) |
| unsigned int | getPriority (void) const |
| void | inf (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void | war (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void void | err (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void void void | cri (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void void void void | debug (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void void void void void | trace (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void void void void void void | spew (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void void void void void void void | dispatch (IMC::Message *msg, unsigned int flags=0) |
| void | dispatch (IMC::Message &msg, unsigned int flags=0) |
| void | dispatchReply (const IMC::Message &original, IMC::Message &msg, unsigned int flags=0) |
| void | receive (const IMC::Message *msg) |
| void | reserveEntities (void) |
| void | resolveEntities (void) |
| void | acquireResources (void) |
| void | releaseResources (void) |
| void | initializeResources (void) |
| void | updateParameters (bool act_deact=true) |
| void | writeParamsXML (std::ostream &os) const |
| const char * | getEntityLabel (void) const |
| void | setEntityLabel (const std::string &label) |
| Public Member Functions inherited from DUNE::Tasks::AbstractTask | |
| AbstractTask (void) | |
| virtual | ~AbstractTask (void) |
| Public Member Functions inherited from DUNE::Concurrency::Thread | |
| Thread (void) | |
| virtual | ~Thread (void) |
| int | getProcessorUsage (void) |
| Public Member Functions inherited from DUNE::Concurrency::Runnable | |
| Runnable (void) | |
| virtual | ~Runnable (void) |
| void | start (void) |
| void | stop (void) |
| void | join (void) |
| void | stopAndJoin (void) |
| void | setPriority (Scheduler::Policy policy, unsigned priority) |
| unsigned | getPriority (void) |
| State | getState (void) |
| bool | isCreated (void) |
| bool | isStopping (void) |
| bool | isRunning (void) |
| bool | isStarting (void) |
| bool | isDead (void) |
Public Attributes | |
| IMC::VehicleMedium | m_vm |
| Time::Counter< float > | m_in_water |
| Time::Counter< float > | m_wet_devs |
| Time::Counter< float > | m_gps_status |
| Time::Counter< float > | m_init |
| uint16_t | m_gps_val_bits |
| float | m_depth |
| float | m_airspeed |
| float | m_gndspeed |
| unsigned | m_medium_eid |
| float | m_altitude |
| Arguments | m_args |
Additional Inherited Members | |
| Public Types inherited from DUNE::Concurrency::Runnable | |
| enum | State { StateStarting, StateRunning, StateStopping, StateDead, StateUnknown } |
| Protected Member Functions inherited from DUNE::Tasks::Task | |
| void | setEntityState (IMC::EntityState::StateEnum state, Status::Code code) |
| void | setEntityState (IMC::EntityState::StateEnum state, const std::string &description) |
| IMC::EntityState::StateEnum | getEntityState (void) const |
| unsigned int | reserveEntity (const std::string &label) |
| template<typename E > | |
| E * | reserveEntity (const std::string &label) |
| bool | stopping (void) |
| bool | isActive (void) const |
| bool | isActivating (void) const |
| bool | isDeactivating (void) const |
| void | waitForMessages (double timeout) |
| void | consumeMessages (void) |
| template<typename T > | |
| Parameter & | param (const std::string &name, T &var) |
| template<typename Y , typename T > | |
| Parameter & | param (const std::string &name, T &var) |
| template<typename T > | |
| bool | paramChanged (T &var) |
| void | paramActive (Parameter::Scope def_scope, Parameter::Visibility def_visibility, bool def_value=false) |
| void | setParamSectionEditor (const std::string &name) |
| template<typename M , typename T > | |
| void | bind (T *task_obj, void(T::*consumer)(const M *)=&T::consume) |
| template<typename T > | |
| void | bind (T *task_obj, const std::vector< uint32_t > &list) |
| template<typename T , typename M > | |
| void | bind (T *task_obj, const std::vector< uint32_t > &list, void(T::*consumer)(const M *)=&T::consume) |
| template<typename T > | |
| void | bind (T *task_obj, const std::vector< std::string > &list) |
| void | requestActivation (void) |
| void | requestDeactivation (void) |
| void | activate (void) |
| void | activationFailed (const std::string &reason) |
| void | deactivate (void) |
| void | deactivationFailed (const std::string &reason) |
| virtual bool | onWriteParamsXML (std::ostream &os) const |
| virtual void | onEntityReservation (void) |
| virtual void | onReportEntityState (void) |
| virtual void | onResourceAcquisition (void) |
| virtual void | onResourceRelease (void) |
| virtual void | onUpdateParameters (void) |
| virtual void | onRequestActivation (void) |
| virtual void | onRequestDeactivation (void) |
| virtual void | onActivation (void) |
| virtual void | onDeactivation (void) |
| virtual void | onQueryEntityParameters (const IMC::QueryEntityParameters *msg) |
| virtual void | onSetEntityParameters (const IMC::SetEntityParameters *msg) |
| virtual void | onPushEntityParameters (const IMC::PushEntityParameters *msg) |
| virtual void | onPopEntityParameters (const IMC::PopEntityParameters *msg) |
| Protected Member Functions inherited from DUNE::Concurrency::Thread | |
| void | startImpl (void) |
| void | stopImpl (void) |
| void | joinImpl (void) |
| void | setPriorityImpl (Scheduler::Policy policy, unsigned priority) |
| unsigned | getPriorityImpl (void) |
| Protected Attributes inherited from DUNE::Tasks::Task | |
| Context & | m_ctx |
| std::vector < Entities::BasicEntity * > | m_entities |
|
inline |
References Monitors::Medium::Arguments::airspeed_lm, Monitors::Medium::Arguments::altitude_lm, DUNE::Tasks::Context::config, DUNE::Tasks::Parameter::defaultValue(), Monitors::Medium::Arguments::depth_lm, DUNE::Parsers::Config::get(), Monitors::Medium::Arguments::gndspeed_lm, Monitors::Medium::Arguments::gps_timeout, Monitors::Medium::Arguments::init_time, Monitors::Medium::Arguments::label_medium, m_args, DUNE::Tasks::Task::m_ctx, m_gps_val_bits, m_wet_devs, DUNE::Tasks::Task::param(), DUNE::Tasks::Task::paramActive(), Monitors::Medium::Arguments::stype, DUNE::Tasks::Parameter::units(), Monitors::Medium::Arguments::vtype, Monitors::Medium::Arguments::water_lm, and Monitors::Medium::Arguments::water_timeout.
|
inline |
Check data input. Only for aerial vehicles.
References Monitors::Medium::Arguments::airspeed_lm, Monitors::Medium::Arguments::altitude_lm, Monitors::Medium::Arguments::gndspeed_lm, isCopter(), isUAV(), m_airspeed, m_altitude, m_args, m_gndspeed, and m_vm.
Referenced by updateStateMachine().
|
inline |
Check data input. Only for water going vehicles.
References checkWater(), Monitors::Medium::Arguments::depth_lm, isGpsAvailable(), isUAV(), m_args, m_depth, m_vm, and waterMediumCheck().
Referenced by updateStateMachine().
|
inline |
Check presence of water sensors.
References inWater(), m_vm, and m_wet_devs.
Referenced by checkUUV().
|
inline |
References DUNE::Tasks::Task::getSystemId(), m_in_water, m_medium_eid, and m_wet_devs.
|
inline |
References DUNE::Tasks::Task::getSystemId(), m_altitude, and m_depth.
|
inline |
References isUAV(), and m_airspeed.
|
inline |
References m_gndspeed, m_gps_status, and m_gps_val_bits.
|
inline |
References isUAV(), m_args, m_in_water, m_wet_devs, and Monitors::Medium::Arguments::water_lm.
|
inline |
References isUAV(), m_args, m_in_water, m_wet_devs, and Monitors::Medium::Arguments::water_lm.
|
inline |
Routine to check if we have recent wet sensor measurements.
References m_in_water.
Referenced by checkWater().
|
inline |
Check if vehicle is a copter.
References isUAV(), m_args, and Monitors::Medium::Arguments::stype.
Referenced by checkUAV().
|
inline |
Routine to check if we have recent valid GPS measurements.
References m_gps_status.
Referenced by checkUUV(), and updateStateMachine().
|
inline |
Check if vehicle is a UAV.
References m_args, and Monitors::Medium::Arguments::vtype.
Referenced by checkUAV(), checkUUV(), consume(), isCopter(), and waterMediumCheck().
|
inlinevirtual |
Called when the task is instructed to resolve all the entity identifiers it needs for normal execution.
See resolveEntity(). Derived classes that need to resolve entity identifiers should override this function.
Reimplemented from DUNE::Tasks::Task.
References Monitors::Medium::Arguments::label_medium, m_args, m_medium_eid, and DUNE::Tasks::Task::resolveEntity().
|
inlinevirtual |
Called when the task is instructed to initialize resources acquired previously or whose initialization depends on run-time parameters.
Reimplemented from DUNE::Tasks::Task.
References Monitors::Medium::Arguments::gps_timeout, Monitors::Medium::Arguments::init_time, m_args, m_gps_status, m_in_water, m_init, and Monitors::Medium::Arguments::water_timeout.
|
inlinevirtual |
The task to be executed on each cycle.
Implements DUNE::Tasks::Periodic.
References m_init, and updateStateMachine().
|
inline |
Update state machine.
References checkUAV(), checkUUV(), Monitors::Medium::Arguments::depth_lm, DUNE::Tasks::Task::dispatch(), DUNE::Tasks::Task::isActive(), isGpsAvailable(), m_args, m_depth, m_vm, and DUNE::Tasks::Task::setEntityState().
Referenced by task().
|
inline |
Check water medium presence.
References DUNE::Tasks::Task::dispatch(), DUNE::Tasks::Task::isActive(), isUAV(), m_vm, m_wet_devs, and DUNE::Tasks::Task::setEntityState().
Referenced by checkUUV().
| float Monitors::Medium::Task::m_airspeed |
Vehicle airspeed.
Referenced by checkUAV(), and consume().
| float Monitors::Medium::Task::m_altitude |
Vehicle Altitude.
Referenced by checkUAV(), and consume().
| Arguments Monitors::Medium::Task::m_args |
Task arguments.
Referenced by checkUAV(), checkUUV(), consume(), isCopter(), isUAV(), onEntityResolution(), onResourceInitialization(), Task(), and updateStateMachine().
| float Monitors::Medium::Task::m_depth |
Vehicle depth.
Referenced by checkUUV(), consume(), and updateStateMachine().
| float Monitors::Medium::Task::m_gndspeed |
Vehicle groundspeed.
Referenced by checkUAV(), and consume().
| Time::Counter<float> Monitors::Medium::Task::m_gps_status |
Timer to check presence of GPS fixes.
Referenced by consume(), isGpsAvailable(), and onResourceInitialization().
| uint16_t Monitors::Medium::Task::m_gps_val_bits |
| Time::Counter<float> Monitors::Medium::Task::m_in_water |
Timer to check status of water measurements.
Referenced by consume(), inWater(), and onResourceInitialization().
| Time::Counter<float> Monitors::Medium::Task::m_init |
Initialization timer.
Referenced by onResourceInitialization(), and task().
| unsigned Monitors::Medium::Task::m_medium_eid |
Medium Sensor entity id.
Referenced by consume(), and onEntityResolution().
| IMC::VehicleMedium Monitors::Medium::Task::m_vm |
Vehicle Medium.
Referenced by checkUAV(), checkUUV(), checkWater(), updateStateMachine(), and waterMediumCheck().
| Time::Counter<float> Monitors::Medium::Task::m_wet_devs |
Timer to check if we're capable of detecting water.
Referenced by checkWater(), consume(), Task(), and waterMediumCheck().
 1.8.6
1.8.6