 |
DUNE: Uniform Navigational Environment
2016.09.0
|
|
DUNE: Uniform Navigational Environment
2016.09.0
|
Public Member Functions | |
| Task (const std::string &name, Tasks::Context &ctx) | |
| void | onUpdateParameters (void) |
| void | onEntityResolution (void) |
| void | consume (const IMC::GroundVelocity *msg) |
| void | consume (const IMC::AngularVelocity *msg) |
| void | consume (const IMC::EulerAngles *msg) |
| void | consume (const IMC::GpsFix *msg) |
| void | onMain (void) |
 Public Member Functions inherited from DUNE::Tasks::Task Public Member Functions inherited from DUNE::Tasks::Task | |
| Task (const std::string &name, Context &context) | |
| virtual | ~Task (void) |
| const char * | getName (void) const |
| const char * | getSystemName (void) const |
| unsigned int | getSystemId (void) const |
| unsigned int | getEntityId (void) const |
| unsigned int | resolveEntity (const std::string &label) const |
| std::string | resolveEntity (unsigned int id) const |
| DebugLevel | getDebugLevel (void) const |
| uint16_t | getActivationTime (void) const |
| uint16_t | getDeactivationTime (void) const |
| unsigned int | resolveSystemName (const std::string &name) const |
| const char * | resolveSystemId (unsigned int id) const |
| void | loadConfig (void) |
| void | setPriority (unsigned int value) |
| unsigned int | getPriority (void) const |
| void | inf (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void | war (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void void | err (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void void void | cri (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void void void void | debug (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void void void void void | trace (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void void void void void void | spew (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void void void void void void void | dispatch (IMC::Message *msg, unsigned int flags=0) |
| void | dispatch (IMC::Message &msg, unsigned int flags=0) |
| void | dispatchReply (const IMC::Message &original, IMC::Message &msg, unsigned int flags=0) |
| void | receive (const IMC::Message *msg) |
| void | reserveEntities (void) |
| void | resolveEntities (void) |
| void | acquireResources (void) |
| void | releaseResources (void) |
| void | initializeResources (void) |
| void | updateParameters (bool act_deact=true) |
| void | writeParamsXML (std::ostream &os) const |
| const char * | getEntityLabel (void) const |
| void | setEntityLabel (const std::string &label) |
| Public Member Functions inherited from DUNE::Tasks::AbstractTask | |
| AbstractTask (void) | |
| virtual | ~AbstractTask (void) |
| Public Member Functions inherited from DUNE::Concurrency::Thread | |
| Thread (void) | |
| virtual | ~Thread (void) |
| int | getProcessorUsage (void) |
| Public Member Functions inherited from DUNE::Concurrency::Runnable | |
| Runnable (void) | |
| virtual | ~Runnable (void) |
| void | start (void) |
| void | stop (void) |
| void | join (void) |
| void | stopAndJoin (void) |
| void | setPriority (Scheduler::Policy policy, unsigned priority) |
| unsigned | getPriority (void) |
| State | getState (void) |
| bool | isCreated (void) |
| bool | isStopping (void) |
| bool | isRunning (void) |
| bool | isStarting (void) |
| bool | isDead (void) |
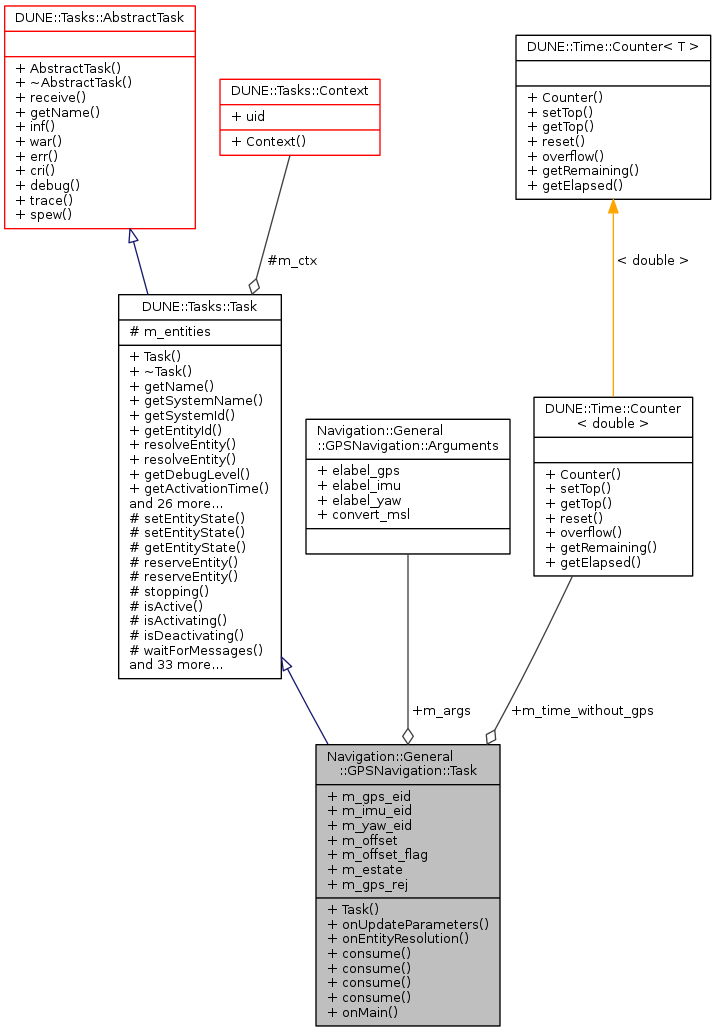
Public Attributes | |
| int | m_gps_eid |
| int | m_imu_eid |
| int | m_yaw_eid |
| float | m_offset |
| bool | m_offset_flag |
| IMC::EstimatedState | m_estate |
| IMC::GpsFixRejection | m_gps_rej |
| Counter< double > | m_time_without_gps |
| Arguments | m_args |
Additional Inherited Members | |
| Public Types inherited from DUNE::Concurrency::Runnable | |
| enum | State { StateStarting, StateRunning, StateStopping, StateDead, StateUnknown } |
| Protected Member Functions inherited from DUNE::Tasks::Task | |
| void | setEntityState (IMC::EntityState::StateEnum state, Status::Code code) |
| void | setEntityState (IMC::EntityState::StateEnum state, const std::string &description) |
| IMC::EntityState::StateEnum | getEntityState (void) const |
| unsigned int | reserveEntity (const std::string &label) |
| template<typename E > | |
| E * | reserveEntity (const std::string &label) |
| bool | stopping (void) |
| bool | isActive (void) const |
| bool | isActivating (void) const |
| bool | isDeactivating (void) const |
| void | waitForMessages (double timeout) |
| void | consumeMessages (void) |
| template<typename T > | |
| Parameter & | param (const std::string &name, T &var) |
| template<typename Y , typename T > | |
| Parameter & | param (const std::string &name, T &var) |
| template<typename T > | |
| bool | paramChanged (T &var) |
| void | paramActive (Parameter::Scope def_scope, Parameter::Visibility def_visibility, bool def_value=false) |
| void | setParamSectionEditor (const std::string &name) |
| template<typename M , typename T > | |
| void | bind (T *task_obj, void(T::*consumer)(const M *)=&T::consume) |
| template<typename T > | |
| void | bind (T *task_obj, const std::vector< uint32_t > &list) |
| template<typename T , typename M > | |
| void | bind (T *task_obj, const std::vector< uint32_t > &list, void(T::*consumer)(const M *)=&T::consume) |
| template<typename T > | |
| void | bind (T *task_obj, const std::vector< std::string > &list) |
| void | requestActivation (void) |
| void | requestDeactivation (void) |
| void | activate (void) |
| void | activationFailed (const std::string &reason) |
| void | deactivate (void) |
| void | deactivationFailed (const std::string &reason) |
| virtual bool | onWriteParamsXML (std::ostream &os) const |
| virtual void | onEntityReservation (void) |
| virtual void | onReportEntityState (void) |
| virtual void | onResourceAcquisition (void) |
| virtual void | onResourceRelease (void) |
| virtual void | onResourceInitialization (void) |
| virtual void | onRequestActivation (void) |
| virtual void | onRequestDeactivation (void) |
| virtual void | onActivation (void) |
| virtual void | onDeactivation (void) |
| virtual void | onQueryEntityParameters (const IMC::QueryEntityParameters *msg) |
| virtual void | onSetEntityParameters (const IMC::SetEntityParameters *msg) |
| virtual void | onPushEntityParameters (const IMC::PushEntityParameters *msg) |
| virtual void | onPopEntityParameters (const IMC::PopEntityParameters *msg) |
| Protected Member Functions inherited from DUNE::Concurrency::Thread | |
| void | startImpl (void) |
| void | stopImpl (void) |
| void | joinImpl (void) |
| void | setPriorityImpl (Scheduler::Policy policy, unsigned priority) |
| unsigned | getPriorityImpl (void) |
| Protected Attributes inherited from DUNE::Tasks::Task | |
| Context & | m_ctx |
| std::vector < Entities::BasicEntity * > | m_entities |
|
inline |
References Navigation::General::GPSNavigation::Arguments::convert_msl, DUNE::Tasks::Parameter::defaultValue(), DUNE::Tasks::Parameter::description(), Navigation::General::GPSNavigation::Arguments::elabel_gps, Navigation::General::GPSNavigation::Arguments::elabel_imu, Navigation::General::GPSNavigation::Arguments::elabel_yaw, m_args, m_estate, m_offset, m_offset_flag, m_time_without_gps, DUNE::Tasks::Task::param(), and DUNE::Time::Counter< T >::setTop().
|
inline |
References m_estate.
|
inline |
|
inline |
|
inline |
References Navigation::General::GPSNavigation::Arguments::convert_msl, DUNE::Tasks::Context::dir_cfg, DUNE::Tasks::Task::dispatch(), m_args, DUNE::Tasks::Task::m_ctx, m_estate, m_gps_eid, m_gps_rej, m_offset, m_offset_flag, m_time_without_gps, DUNE::Time::Counter< T >::reset(), and DUNE::Tasks::Task::setEntityState().
|
inlinevirtual |
Called when the task is instructed to resolve all the entity identifiers it needs for normal execution.
See resolveEntity(). Derived classes that need to resolve entity identifiers should override this function.
Reimplemented from DUNE::Tasks::Task.
References Navigation::General::GPSNavigation::Arguments::elabel_gps, Navigation::General::GPSNavigation::Arguments::elabel_imu, Navigation::General::GPSNavigation::Arguments::elabel_yaw, m_args, m_gps_eid, m_imu_eid, m_yaw_eid, and DUNE::Tasks::Task::resolveEntity().
|
inlinevirtual |
|
inlinevirtual |
Called when the task is instructed to update its run-time parameters.
Derived classes that need to compute auxiliary values based on run-time parameters should override this function.
Reimplemented from DUNE::Tasks::Task.
References Navigation::General::GPSNavigation::Arguments::convert_msl, m_args, m_offset, and m_offset_flag.
| Arguments Navigation::General::GPSNavigation::Task::m_args |
Task arguments.
Referenced by consume(), onEntityResolution(), onUpdateParameters(), and Task().
| IMC::EstimatedState Navigation::General::GPSNavigation::Task::m_estate |
| int Navigation::General::GPSNavigation::Task::m_gps_eid |
GPS entity eid.
Referenced by consume(), and onEntityResolution().
| IMC::GpsFixRejection Navigation::General::GPSNavigation::Task::m_gps_rej |
GPS fix rejection.
Referenced by consume().
| int Navigation::General::GPSNavigation::Task::m_imu_eid |
IMU entity eid.
Referenced by consume(), and onEntityResolution().
| float Navigation::General::GPSNavigation::Task::m_offset |
Height offset.
Referenced by consume(), onUpdateParameters(), and Task().
| bool Navigation::General::GPSNavigation::Task::m_offset_flag |
Offset flag.
Referenced by consume(), onUpdateParameters(), and Task().
| Counter<double> Navigation::General::GPSNavigation::Task::m_time_without_gps |
| int Navigation::General::GPSNavigation::Task::m_yaw_eid |
Yaw entity eid.
Referenced by consume(), and onEntityResolution().
 1.8.6
1.8.6