 |
DUNE: Uniform Navigational Environment
2016.09.0
|
|
DUNE: Uniform Navigational Environment
2016.09.0
|
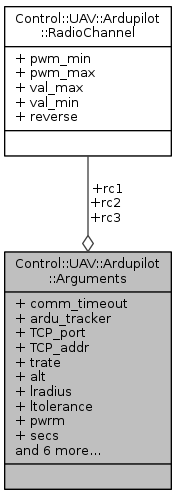
Task arguments.
Public Attributes | |
| uint8_t | comm_timeout |
| bool | ardu_tracker |
| uint16_t | TCP_port |
| Address | TCP_addr |
| uint8_t | trate |
| float | alt |
| float | lradius |
| int | ltolerance |
| bool | pwrm |
| int | secs |
| float | cp_wp_radius |
| RadioChannel | rc1 |
| RadioChannel | rc2 |
| RadioChannel | rc3 |
| bool | hitl |
| bool | form_fl |
| std::string | form_fl_ent |
| bool | convert_msl |
| bool | loiter_idle |
| float Control::UAV::Ardupilot::Arguments::alt |
| bool Control::UAV::Ardupilot::Arguments::ardu_tracker |
Use Ardupilot's waypoint tracker.
Referenced by Control::UAV::Ardupilot::Task::consume(), Control::UAV::Ardupilot::Task::handleNavControllerPacket(), and Control::UAV::Ardupilot::Task::Task().
| uint8_t Control::UAV::Ardupilot::Arguments::comm_timeout |
Communications timeout.
Referenced by Control::UAV::Ardupilot::Task::handleArdupilotData(), and Control::UAV::Ardupilot::Task::Task().
| bool Control::UAV::Ardupilot::Arguments::convert_msl |
Convert MSL to WGS84 height.
Referenced by Control::UAV::Ardupilot::Task::handlePositionPacket(), and Control::UAV::Ardupilot::Task::Task().
| float Control::UAV::Ardupilot::Arguments::cp_wp_radius |
WP Copter: Minimum wp switch radius.
Referenced by Control::UAV::Ardupilot::Task::handleNavControllerPacket(), and Control::UAV::Ardupilot::Task::Task().
| bool Control::UAV::Ardupilot::Arguments::form_fl |
Formation Flight.
Referenced by Control::UAV::Ardupilot::Task::consume(), and Control::UAV::Ardupilot::Task::Task().
| std::string Control::UAV::Ardupilot::Arguments::form_fl_ent |
Referenced by Control::UAV::Ardupilot::Task::consume(), and Control::UAV::Ardupilot::Task::Task().
| bool Control::UAV::Ardupilot::Arguments::hitl |
HITL.
Referenced by Control::UAV::Ardupilot::Task::handleSystemTimePacket(), and Control::UAV::Ardupilot::Task::Task().
| bool Control::UAV::Ardupilot::Arguments::loiter_idle |
Enter loiter mode when in idle.
Referenced by Control::UAV::Ardupilot::Task::consume(), Control::UAV::Ardupilot::Task::handleHeartbeatPacket(), and Control::UAV::Ardupilot::Task::Task().
| float Control::UAV::Ardupilot::Arguments::lradius |
LoiterHere (default) radius.
Referenced by Control::UAV::Ardupilot::Task::loiterHere(), and Control::UAV::Ardupilot::Task::Task().
| int Control::UAV::Ardupilot::Arguments::ltolerance |
Loitering tolerance.
Referenced by Control::UAV::Ardupilot::Task::handleNavControllerPacket(), and Control::UAV::Ardupilot::Task::Task().
| bool Control::UAV::Ardupilot::Arguments::pwrm |
| RadioChannel Control::UAV::Ardupilot::Arguments::rc1 |
RC setup.
Referenced by Control::UAV::Ardupilot::Task::consume(), Control::UAV::Ardupilot::Task::onUpdateParameters(), and Control::UAV::Ardupilot::Task::Task().
| RadioChannel Control::UAV::Ardupilot::Arguments::rc2 |
| RadioChannel Control::UAV::Ardupilot::Arguments::rc3 |
Referenced by Control::UAV::Ardupilot::Task::consume(), and Control::UAV::Ardupilot::Task::Task().
| int Control::UAV::Ardupilot::Arguments::secs |
WP seconds before reach.
Referenced by Control::UAV::Ardupilot::Task::handleNavControllerPacket(), and Control::UAV::Ardupilot::Task::Task().
| Address Control::UAV::Ardupilot::Arguments::TCP_addr |
TCP Address.
Referenced by Control::UAV::Ardupilot::Task::openConnection(), Control::UAV::Ardupilot::Task::receiveData(), and Control::UAV::Ardupilot::Task::Task().
| uint16_t Control::UAV::Ardupilot::Arguments::TCP_port |
TCP Port.
Referenced by Control::UAV::Ardupilot::Task::openConnection(), Control::UAV::Ardupilot::Task::receiveData(), and Control::UAV::Ardupilot::Task::Task().
| uint8_t Control::UAV::Ardupilot::Arguments::trate |
Telemetry Rate.
Referenced by Control::UAV::Ardupilot::Task::handleHeartbeatPacket(), Control::UAV::Ardupilot::Task::openConnection(), and Control::UAV::Ardupilot::Task::Task().
 1.8.6
1.8.6