 |
DUNE: Uniform Navigational Environment
2016.09.0
|
|
DUNE: Uniform Navigational Environment
2016.09.0
|
Public Member Functions | |
| Task (const std::string &name, Tasks::Context &ctx) | |
| void | reset (void) |
| void | onResourceInitialization (void) |
| void | onUpdateParameters (void) |
| void | onEntityReservation (void) |
| void | onEstimatedState (const double timestep, const IMC::EstimatedState *msg) |
| float | surgeControl (const double timestep, const IMC::EstimatedState *msg) |
| float | swayControl (const double timestep, const IMC::EstimatedState *msg) |
| void | logDesiredHRate (float value) |
| float | headingControl (const double timestep, const IMC::EstimatedState *msg) |
| void | tal (double X, double Y, double N) |
 Public Member Functions inherited from DUNE::Control::BasicAutopilot Public Member Functions inherited from DUNE::Control::BasicAutopilot | |
| BasicAutopilot (const std::string &name, Tasks::Context &ctx, const uint32_t controllable_loops, const uint32_t required_loops) | |
| virtual | ~BasicAutopilot (void) |
| virtual void | onResourceAcquisition (void) |
| virtual void | onResourceRelease (void) |
| virtual void | onEstimatedState (const double timestep, const IMC::EstimatedState *msg)=0 |
| void | consume (const IMC::EstimatedState *msg) |
| void | consume (const IMC::DesiredZ *msg) |
| void | consume (const IMC::DesiredPitch *msg) |
| void | consume (const IMC::DesiredHeading *msg) |
| void | consume (const IMC::DesiredHeadingRate *msg) |
| void | consume (const IMC::ControlLoops *msg) |
| void | consume (const IMC::DesiredVelocity *msg) |
| void | onMain (void) |
| Public Member Functions inherited from DUNE::Tasks::Task | |
| Task (const std::string &name, Context &context) | |
| virtual | ~Task (void) |
| const char * | getName (void) const |
| const char * | getSystemName (void) const |
| unsigned int | getSystemId (void) const |
| unsigned int | getEntityId (void) const |
| unsigned int | resolveEntity (const std::string &label) const |
| std::string | resolveEntity (unsigned int id) const |
| DebugLevel | getDebugLevel (void) const |
| uint16_t | getActivationTime (void) const |
| uint16_t | getDeactivationTime (void) const |
| unsigned int | resolveSystemName (const std::string &name) const |
| const char * | resolveSystemId (unsigned int id) const |
| void | loadConfig (void) |
| void | setPriority (unsigned int value) |
| unsigned int | getPriority (void) const |
| void | inf (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void | war (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void void | err (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void void void | cri (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void void void void | debug (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void void void void void | trace (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void void void void void void | spew (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void void void void void void void | dispatch (IMC::Message *msg, unsigned int flags=0) |
| void | dispatch (IMC::Message &msg, unsigned int flags=0) |
| void | dispatchReply (const IMC::Message &original, IMC::Message &msg, unsigned int flags=0) |
| void | receive (const IMC::Message *msg) |
| void | reserveEntities (void) |
| void | resolveEntities (void) |
| void | acquireResources (void) |
| void | releaseResources (void) |
| void | initializeResources (void) |
| void | updateParameters (bool act_deact=true) |
| void | writeParamsXML (std::ostream &os) const |
| const char * | getEntityLabel (void) const |
| void | setEntityLabel (const std::string &label) |
| Public Member Functions inherited from DUNE::Tasks::AbstractTask | |
| AbstractTask (void) | |
| virtual | ~AbstractTask (void) |
| Public Member Functions inherited from DUNE::Concurrency::Thread | |
| Thread (void) | |
| virtual | ~Thread (void) |
| int | getProcessorUsage (void) |
| Public Member Functions inherited from DUNE::Concurrency::Runnable | |
| Runnable (void) | |
| virtual | ~Runnable (void) |
| void | start (void) |
| void | stop (void) |
| void | join (void) |
| void | stopAndJoin (void) |
| void | setPriority (Scheduler::Policy policy, unsigned priority) |
| unsigned | getPriority (void) |
| State | getState (void) |
| bool | isCreated (void) |
| bool | isStopping (void) |
| bool | isRunning (void) |
| bool | isStarting (void) |
| bool | isDead (void) |
Public Attributes | |
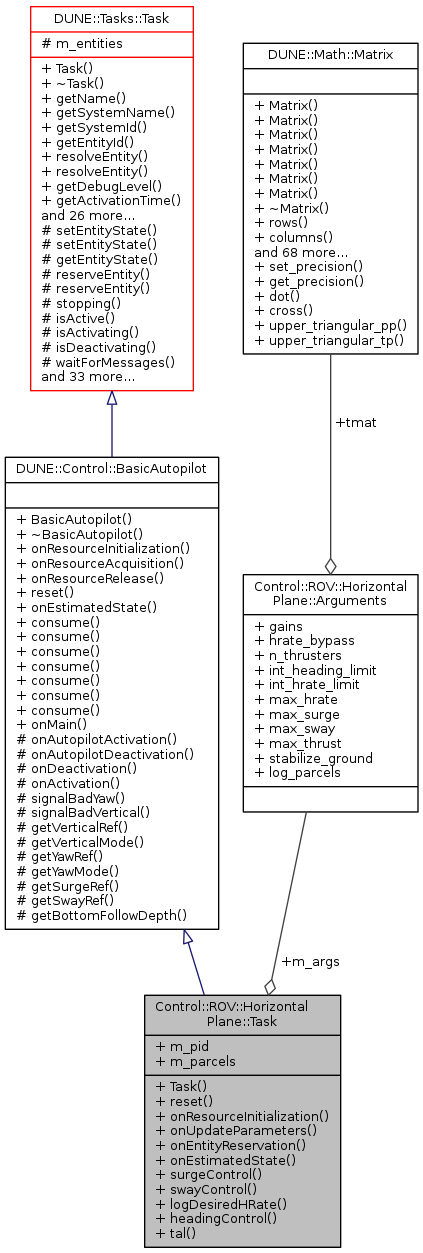
| DiscretePID | m_pid [LP_MAX_LOOPS] |
| IMC::ControlParcel | m_parcels [LP_MAX_LOOPS] |
| Arguments | m_args |
Additional Inherited Members | |
| Public Types inherited from DUNE::Concurrency::Runnable | |
| enum | State { StateStarting, StateRunning, StateStopping, StateDead, StateUnknown } |
| Protected Types inherited from DUNE::Control::BasicAutopilot | |
| enum | VerticalMode { VERTICAL_MODE_NONE, VERTICAL_MODE_DEPTH, VERTICAL_MODE_ALTITUDE, VERTICAL_MODE_PITCH, VERTICAL_MODE_HEAVE, VERTICAL_MODE_SIZE } |
| enum | YawMode { YAW_MODE_NONE, YAW_MODE_HEADING, YAW_MODE_HRATE, YAW_MODE_BYPASS, YAW_MODE_SIZE } |
| Protected Member Functions inherited from DUNE::Control::BasicAutopilot | |
| virtual void | onAutopilotActivation (void) |
| virtual void | onAutopilotDeactivation (void) |
| void | onDeactivation (void) |
| void | onActivation (void) |
| void | signalBadYaw (const char *desc=DTR("yaw control mode %d not supported")) |
| void | signalBadVertical (const char *desc=DTR("vertical control mode %d not supported")) |
| float | getVerticalRef (void) const |
| VerticalMode | getVerticalMode (void) const |
| float | getYawRef (void) const |
| YawMode | getYawMode (void) const |
| float | getSurgeRef (void) const |
| float | getSwayRef (void) const |
| float | getBottomFollowDepth (void) const |
| Protected Member Functions inherited from DUNE::Tasks::Task | |
| void | setEntityState (IMC::EntityState::StateEnum state, Status::Code code) |
| void | setEntityState (IMC::EntityState::StateEnum state, const std::string &description) |
| IMC::EntityState::StateEnum | getEntityState (void) const |
| unsigned int | reserveEntity (const std::string &label) |
| template<typename E > | |
| E * | reserveEntity (const std::string &label) |
| bool | stopping (void) |
| bool | isActive (void) const |
| bool | isActivating (void) const |
| bool | isDeactivating (void) const |
| void | waitForMessages (double timeout) |
| void | consumeMessages (void) |
| template<typename T > | |
| Parameter & | param (const std::string &name, T &var) |
| template<typename Y , typename T > | |
| Parameter & | param (const std::string &name, T &var) |
| template<typename T > | |
| bool | paramChanged (T &var) |
| void | paramActive (Parameter::Scope def_scope, Parameter::Visibility def_visibility, bool def_value=false) |
| void | setParamSectionEditor (const std::string &name) |
| template<typename M , typename T > | |
| void | bind (T *task_obj, void(T::*consumer)(const M *)=&T::consume) |
| template<typename T > | |
| void | bind (T *task_obj, const std::vector< uint32_t > &list) |
| template<typename T , typename M > | |
| void | bind (T *task_obj, const std::vector< uint32_t > &list, void(T::*consumer)(const M *)=&T::consume) |
| template<typename T > | |
| void | bind (T *task_obj, const std::vector< std::string > &list) |
| void | requestActivation (void) |
| void | requestDeactivation (void) |
| void | activate (void) |
| void | activationFailed (const std::string &reason) |
| void | deactivate (void) |
| void | deactivationFailed (const std::string &reason) |
| virtual bool | onWriteParamsXML (std::ostream &os) const |
| virtual void | onEntityResolution (void) |
| virtual void | onReportEntityState (void) |
| virtual void | onRequestActivation (void) |
| virtual void | onRequestDeactivation (void) |
| virtual void | onQueryEntityParameters (const IMC::QueryEntityParameters *msg) |
| virtual void | onSetEntityParameters (const IMC::SetEntityParameters *msg) |
| virtual void | onPushEntityParameters (const IMC::PushEntityParameters *msg) |
| virtual void | onPopEntityParameters (const IMC::PopEntityParameters *msg) |
| Protected Member Functions inherited from DUNE::Concurrency::Thread | |
| void | startImpl (void) |
| void | stopImpl (void) |
| void | joinImpl (void) |
| void | setPriorityImpl (Scheduler::Policy policy, unsigned priority) |
| unsigned | getPriorityImpl (void) |
| Protected Attributes inherited from DUNE::Tasks::Task | |
| Context & | m_ctx |
| std::vector < Entities::BasicEntity * > | m_entities |
|
inline |
References DUNE::Tasks::Parameter::defaultValue(), Control::ROV::HorizontalPlane::Arguments::gains, Control::ROV::HorizontalPlane::Arguments::hrate_bypass, Control::ROV::HorizontalPlane::Arguments::int_heading_limit, Control::ROV::HorizontalPlane::Arguments::int_hrate_limit, Control::ROV::HorizontalPlane::Arguments::log_parcels, Control::ROV::HorizontalPlane::LP_MAX_LOOPS, m_args, Control::ROV::HorizontalPlane::Arguments::max_hrate, Control::ROV::HorizontalPlane::Arguments::max_surge, Control::ROV::HorizontalPlane::Arguments::max_sway, Control::ROV::HorizontalPlane::Arguments::max_thrust, Control::ROV::HorizontalPlane::Arguments::n_thrusters, DUNE::Tasks::Task::param(), Control::ROV::HorizontalPlane::Arguments::stabilize_ground, and Control::ROV::HorizontalPlane::Arguments::tmat.
|
inline |
Compute thrust necessary to comply with desired heading or heading rate.
References DUNE::Control::BasicAutopilot::getYawMode(), DUNE::Control::BasicAutopilot::getYawRef(), logDesiredHRate(), Control::ROV::HorizontalPlane::LP_HEADING, Control::ROV::HorizontalPlane::LP_HRATE, m_pid, DUNE::Control::BasicAutopilot::signalBadYaw(), DUNE::Control::BasicAutopilot::YAW_MODE_BYPASS, DUNE::Control::BasicAutopilot::YAW_MODE_HEADING, and DUNE::Control::BasicAutopilot::YAW_MODE_HRATE.
Referenced by onEstimatedState().
|
inline |
|
inlinevirtual |
Called when the task is instructed to reserve all the entity identifiers it needs for normal execution.
See reserveEntity(). Derived classes that need to reserve entity identifiers other than that of the main entity should override this function.
Reimplemented from DUNE::Tasks::Task.
References Control::ROV::HorizontalPlane::Arguments::log_parcels, Control::ROV::HorizontalPlane::LP_MAX_LOOPS, m_args, m_parcels, and DUNE::Tasks::Task::reserveEntity().
|
inline |
References headingControl(), surgeControl(), swayControl(), and tal().
|
inlinevirtual |
Called when the task is instructed to initialize resources acquired previously or whose initialization depends on run-time parameters.
Reimplemented from DUNE::Control::BasicAutopilot.
|
inlinevirtual |
Called when the task is instructed to update its run-time parameters.
Derived classes that need to compute auxiliary values based on run-time parameters should override this function.
Reimplemented from DUNE::Tasks::Task.
References Control::ROV::HorizontalPlane::Arguments::gains, Control::ROV::HorizontalPlane::Arguments::int_heading_limit, Control::ROV::HorizontalPlane::Arguments::int_hrate_limit, Control::ROV::HorizontalPlane::Arguments::log_parcels, Control::ROV::HorizontalPlane::LP_HEADING, Control::ROV::HorizontalPlane::LP_HRATE, Control::ROV::HorizontalPlane::LP_MAX_LOOPS, Control::ROV::HorizontalPlane::LP_SURGE, Control::ROV::HorizontalPlane::LP_SWAY, m_args, m_parcels, m_pid, Control::ROV::HorizontalPlane::Arguments::max_hrate, Control::ROV::HorizontalPlane::Arguments::max_thrust, DUNE::Tasks::Task::paramChanged(), and reset().
|
inlinevirtual |
Reset to initial values.
Reimplemented from DUNE::Control::BasicAutopilot.
References Control::ROV::HorizontalPlane::LP_MAX_LOOPS, m_pid, and tal().
Referenced by onUpdateParameters().
|
inline |
Compute thrust necessary to comply with desired surge speed.
References DUNE::Control::BasicAutopilot::getSurgeRef(), Control::ROV::HorizontalPlane::LP_SURGE, m_args, m_pid, and Control::ROV::HorizontalPlane::Arguments::stabilize_ground.
Referenced by onEstimatedState().
|
inline |
Compute thrust necessary to comply with desired sway speed.
References DUNE::Control::BasicAutopilot::getSwayRef(), Control::ROV::HorizontalPlane::LP_SWAY, m_args, m_pid, and Control::ROV::HorizontalPlane::Arguments::stabilize_ground.
Referenced by onEstimatedState().
|
inline |
function for thrust allocation surge, sway and yaw force (respectively X, Y and N)
References DUNE::Tasks::Task::dispatch(), m_args, Control::ROV::HorizontalPlane::Arguments::max_thrust, Control::ROV::HorizontalPlane::Arguments::n_thrusters, Control::ROV::HorizontalPlane::Arguments::tmat, and DUNE::Math::trimValue().
Referenced by onEstimatedState(), and reset().
| Arguments Control::ROV::HorizontalPlane::Task::m_args |
Referenced by onEntityReservation(), onUpdateParameters(), surgeControl(), swayControl(), tal(), and Task().
| IMC::ControlParcel Control::ROV::HorizontalPlane::Task::m_parcels[LP_MAX_LOOPS] |
PID parcels.
Referenced by onEntityReservation(), and onUpdateParameters().
| DiscretePID Control::ROV::HorizontalPlane::Task::m_pid[LP_MAX_LOOPS] |
PID controllers.
Referenced by headingControl(), onUpdateParameters(), reset(), surgeControl(), and swayControl().
 1.8.6
1.8.6