
MASCOT - Maritime Autonomous Sampling and Control

MASCOT is an interdisciplinary project to build on the science of statistical sampling for oceanographic applications with autonomous robots.
Sampling refers to the design of observational strategies in spatio-temporal domains, enabling autonomous platforms to decide on a strategy of where and when to make measurements to increase our knowledge of dynamic environments like the upper water-column. While the project's focus is on methodological development of algorithms, we will leverage complex oceanographic models on shore to build statistical models and generate a strategy for sampling, and embed these onboard autonomous marine vehicles, validating the theory while impacting the science of oceanography.
MASCOT project aims to answer the following main research questions:
- How to fit realistic spatio-temporal statistical models from ocean simulations and available
measurements, for prediction of river plume fronts?
- Where and when to sample with autonomous vehicles for effective improved characterization
of river plume fronts, using realistic spatio-temporal statistical models for these phenomena?
- What is required to translate these methodologies and couple them with opportunistic control of robotic vehicles to engage in focused ocean science driven field experiments?
LSTS team will be mostly dedicated to tasks related to field experiments and validation. MASCOT proposes field operations related to river plumes in both the Trondheim area (Nidelva river) in Norway and Porto (Douro river) in Portugal for comparative analysis. The substantially different dynamics likely lead to insights in how environmental impacts to VOI can be characterized. In addition, the plume surface shape and vertical stratification can strongly change over time, posing not only a different challenge for system validation, but also in understanding the robustness of our statistical models. In the Douro River Plume, the LSTS team will be responsible to lead and organize all AUV operations.
In the video: Douro River Plume
The project consortium is led by NTNU. SINTEF Ocean and LSTS-FEUP are the partners. MASCOT is funded by the Norwegian Research Council.
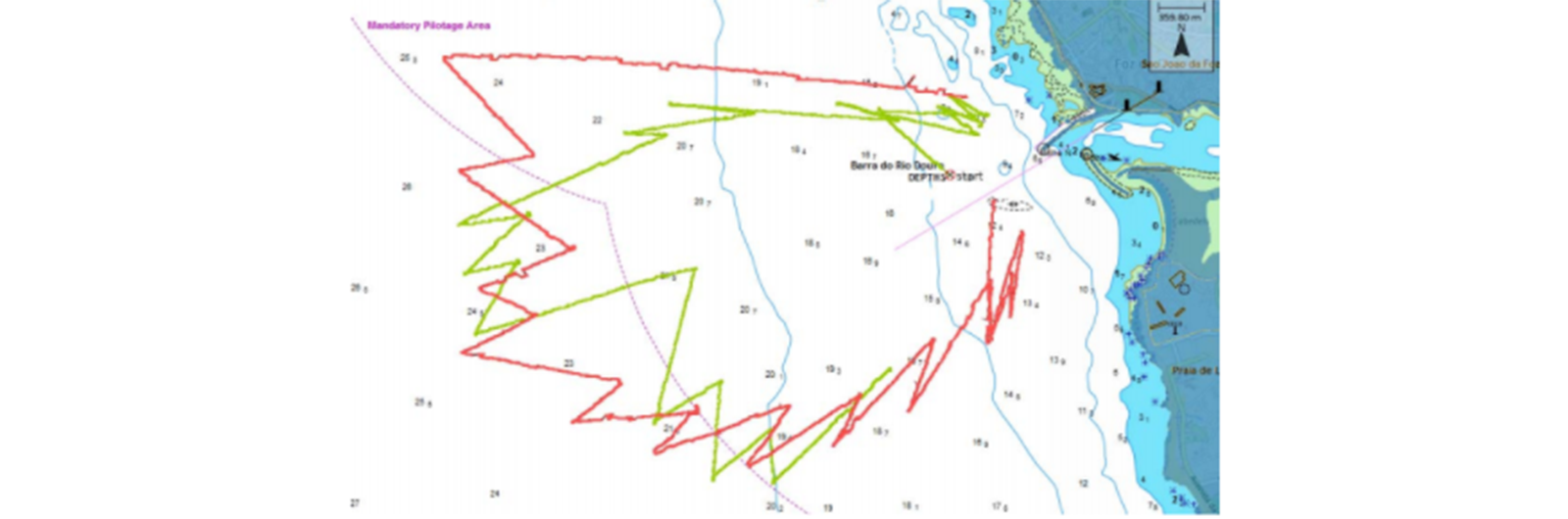
Previous approaches to the problem of adaptive tracking and sampling of the Douro River Plume (paper). Trajectories from two LAUV vehicles mapping the plume in opposite directions. Red trajectory corresponds to a vehicle mapping the trajectory from south to north and the green line, a vehicle mapping the plume from north.