
New paper from LSTS published on new open access Field Robotics journal
The paper described the robotic implementation during the SOI cruise in 2018, led by LSTS-FEUP.
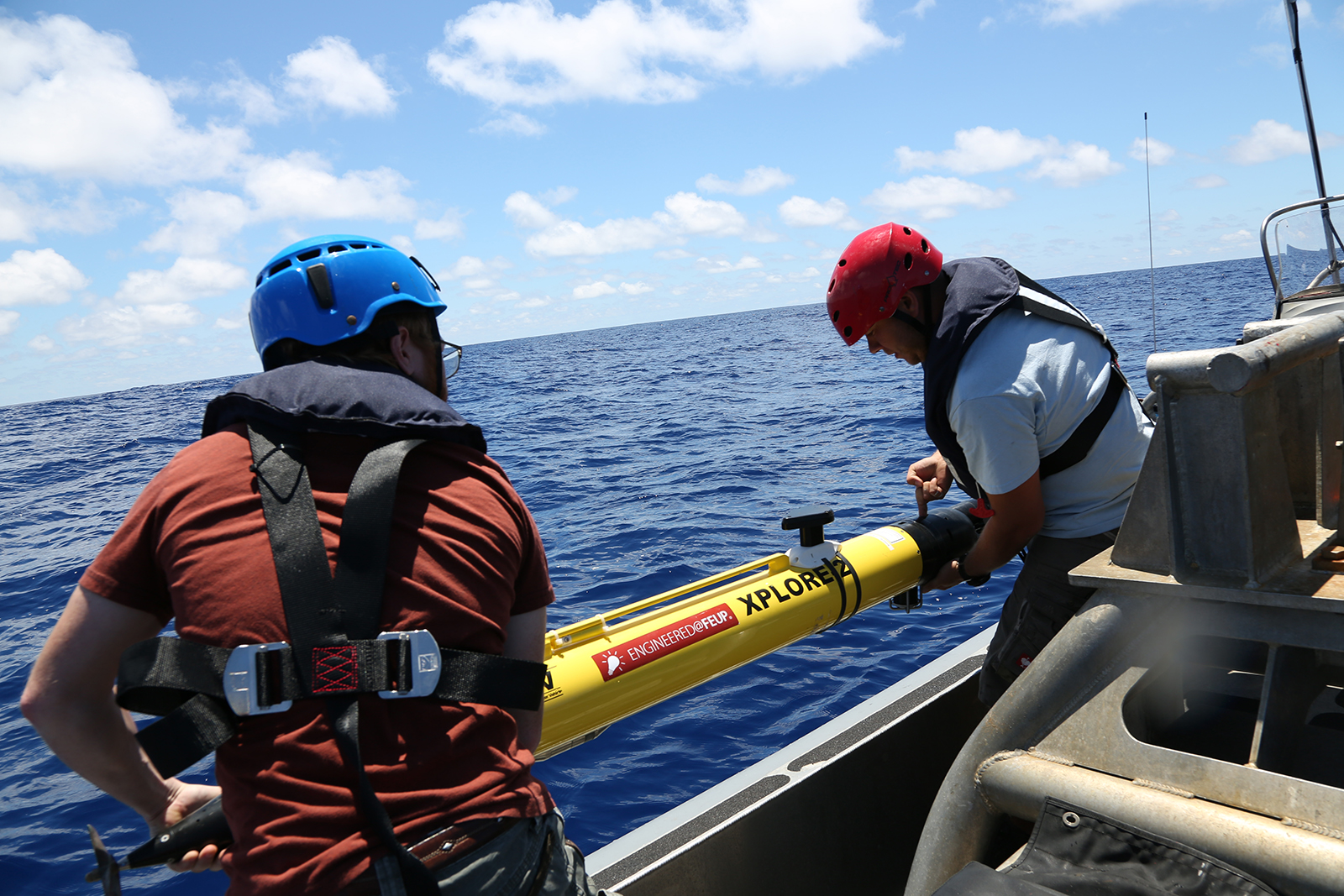
Our work with networked marine robotics in the aerial, surface and underwater domains is at the vanguard of a new approach to scientific exploration and observation, which brings together several technologies to enable oceanographic vessels and robots to work in tandem, thus expanding the observational footprint of these vessels. We describe a scientific cruise in the open waters of the Pacific where we deployed a fleet of autonomous robots to demonstrate this approach for the synoptic observation of mesoscale and sub-mesoscale features of a frontal zone. We articulate the elements and methods for multi-vehicle coordination and the challenges that lie ahead in ocean observation.
The pdf is available here:
About Field Robotics: https://www.journalfieldrobotics.org/Field_Robotics/Home.html